收稿日期:2008-07-23
基金项目:中央级公益性科研院所基本科研业务专项基金项目(ZDJ2008-23)资助.
基金项目:中央级公益性科研院所基本科研业务专项基金项目(ZDJ2008-23)资助.
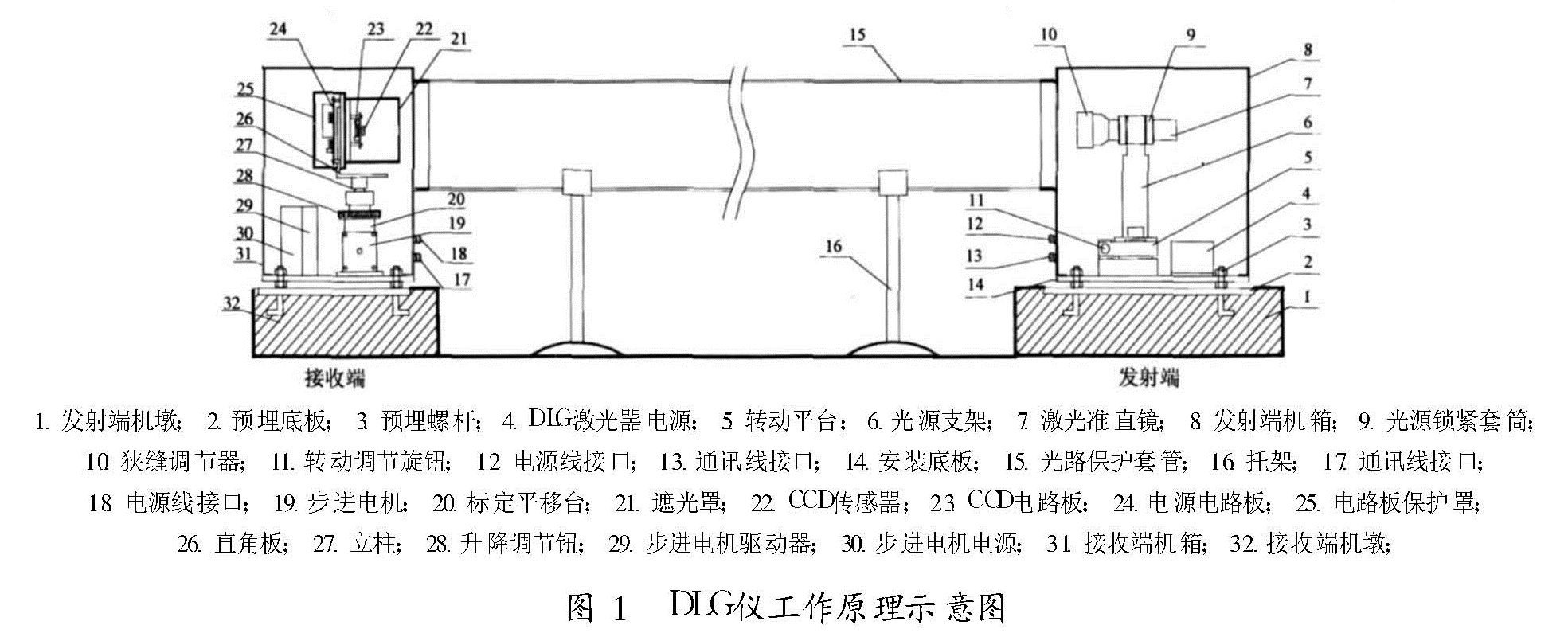
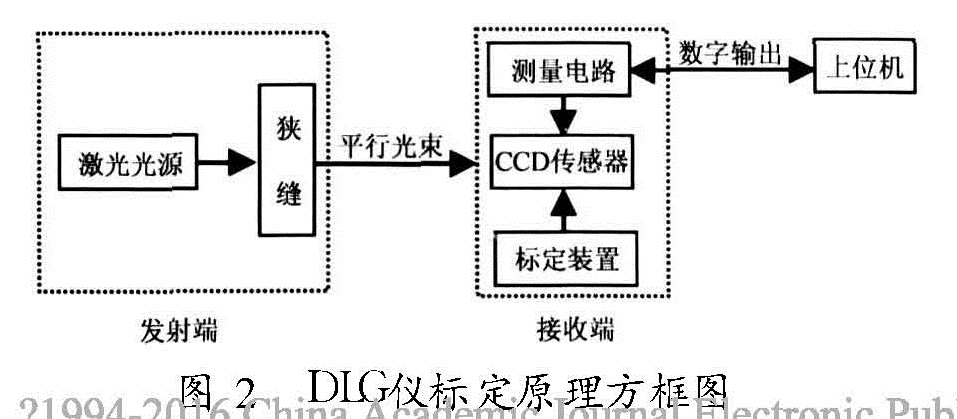
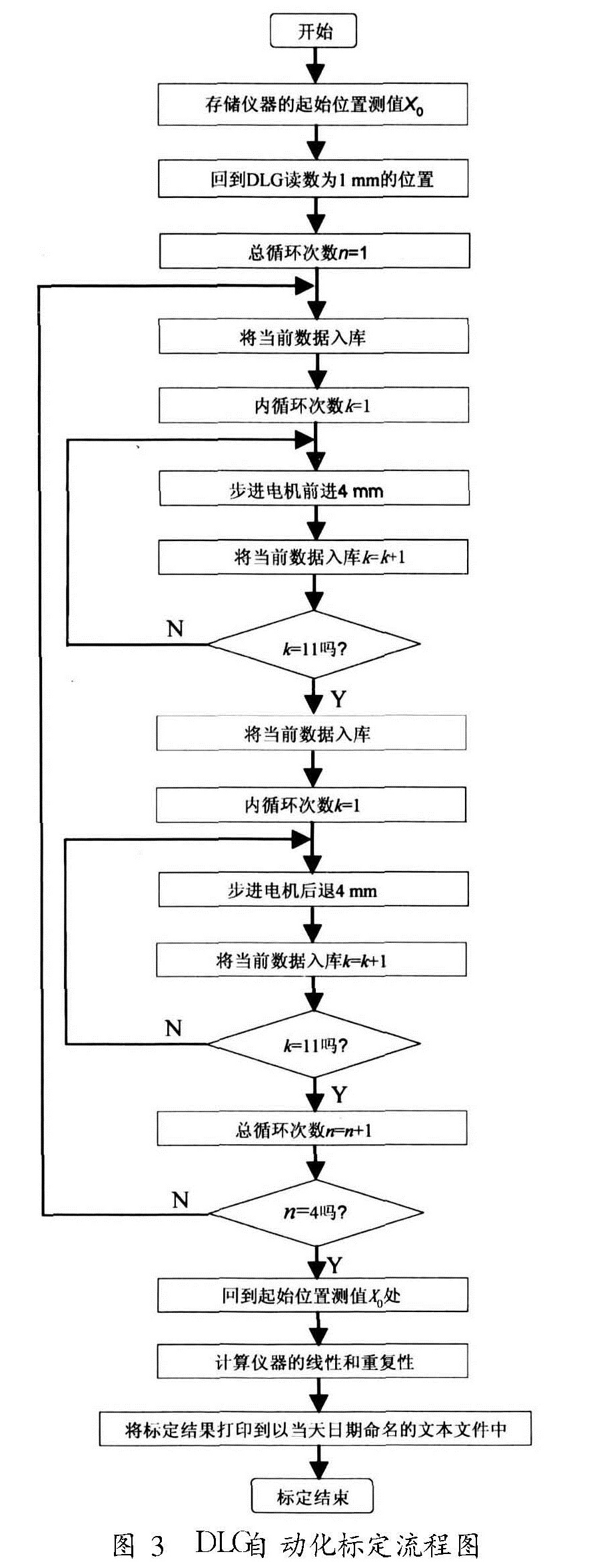
介绍了DLG型断层位移水平切向分量测量仪的自动化标定系统组成、标定原理和标定过程。给出了该标定系统在北京市丰台区大灰厂地震台的实际标定结果,该结果满足地壳形变观测仪技术标准的要求。
We introduce the composition of automatic calibrating system,and calibrating principle and method of DLG-type fault shearing deformation monitoring instrument,and give the calibrating result of the system at the Dahuichang seismic station,Fengtai,Beijing.The calibrating result satisfies the demand for corresponding industry standards.