2.1 DTOA和DOA联合定位算法求初始值
利用相位干涉仪测向方法,各辅站测得的目标的俯仰角分别为
sinα1=(z-z1)〖JB<1/〗r1,(4)
sinα2=(z-z2)〖JB<1/〗r2,(5)
sinα3=(z-z3)〖JB<1/〗r3.(6)
式中,αi(i=1,2,3)表示各辅站测得的俯仰角; z表示目标辐射源的高度。
将式(1)和式(4)组成方程组(其中,i=1,2),称为子系统Ⅰ,同理,将式(1)和式(5)组成方程组(其中,i=2,3),称为子系统Ⅱ,式(1)和式(6)组成方程组(其中,i=1,3),称为子系统Ⅲ,这三个子系统均可完成对目标的空间三维定位,我们选择这三个子系统组成一个冗余定位系统,则该系统的定位方程组为:
{sinα1(z-z1)〖JB<1/〗r1
r20=(x-x0)2+(y-y0)2+(z-z0)2
r2i=(x-xi)2+(y-yi)2+(z-zi)2
r0i=r0-ri=ct0i,(7)
其中,i=1,2,可改写为
{z=(r0-r01)sinα1+z1
(x0-x1)x+(y0-y1)y+(z0-z1)z=k1+r0r01
(x0-x2)x+(y0-y2)y+(z0-z2)z=k2+r0r02.(8)
其中,ki=1/2[r20i+(x20+y20+z20)-(x2i+y2i+z2i)]
(i=1,2),可改矩阵形式为
AX=F.(9)
其中,A={0 0 1
x0-x1 y0-y1 z0-z1
x0-x2 y0-y2 z0-z2},A是可逆矩阵,可以求得X的最小二乘解为
X^=(ATA)-1ATF.(10)
在消除定位模糊以后,3个子系统一共会有3个定位解,如何利用这3个定位解来获取更加精确的目标真实位置是测向测时差联合定位所要解决的关键问题。可以采用简化加权最小二乘(SWLS)的方法对目标位置进行估计(吕明,郭士民,2007; Carter,1987)。
假设3个子系统所得到的目标位置分别为X^i(i=1,2,3),定位协方差矩阵分别为Pi(i=1,2,3),各协方差矩阵之间互不相关。SWLS融合后的目标位置为(Petre,Li,2006; 毛永毅,白菊蓉,2006)
X^=[x^y^z^]T=[∑3i=1p-1i]-1∑3i=1p-1iX^i.(11)
2.2 牛顿迭代定位算法
牛顿法是一种使用导数的算法,每一步迭代方向都是沿着当前点函数值下降的方向。因此,需设定合适的初值才能保证算法是否收敛及其收敛速度。根据牛顿迭代算法的条件,将所建立目标定位模型转换为(柳辉,2007)
fi(x,y,z)=((x-x0)2+(y-y0)2+(z-z0)2)1/2-((x-xi)2+(y-yi)2+(z-zi)2)1/2-ct0i,(12)
其雅克比矩阵为
f'(x,y,z)=[f1/x f1/y f1/z
f2/x f2/y f2/z
f3/x f3/y f3/z],(13)
当雅克比矩阵为非奇异阵,则震源坐标用牛顿迭代法表示为
[x(k+1)
y(k+1)
z(k+1)]=[x(k)
y(k)
z(k)]-fi(x,y,z)-1[f1(x(k),y(k),z(k))
f2(x(k),y(k),z(k))
f3(x(k),y(k),z(k))].
(14)
2 计算机仿真及分析
在野外条件下,通过实验完成震源定位。首先测算震动波在试验场地介质中的传播速度,再根据加速度传感器接收到的震动波数据,结合震源定位的原理及算法,得出震源的位置(邹翔宇,徐翊峰,2010)。
震动波在该实验场地介质中的传播速度测算具体方法是:在距离待爆炸位置3 m、5 m、7 m、10 m、15 m的直线上分别依次布设5个加速度传感器A、B、C、D、E,埋深均为0.5 m,在同一位置爆炸3次,通过数据采集仪采集震动波数据,并将数据储存在计算机里,利用MATLAB对信号进行分析处理,计算出两个加速度传感器之间接收到震动信号的时间差,根据两个传感器距离震源的距离差计算震动波的传播速度v=Δd/Δt。通过计算测得的震动波传播速度如表1所示。
表1 震动波传播速度测算
Tab.1 Measurement of vibratioon wave propagation velocity
通过加速度传感器接收到的震动波分析处理可大致得到震动波的传播规律,在距震源约7 m处的震动信号衰减为弹性波。以此为依据在待测震源周围布设加速度传感器,传感器基站的位置分别为(6,3,-0.5),(-4,6,-0.4),(-6,-5,-0.42),(7,-4,-0.28),(0,5,-0.38)。数据采集仪的采样率为10 kHz,采样时间为6.553 8 s,采用手动触发方式。在同一地点爆炸3次,通过测算的震动波传播速度,传感器基站间接收到震动波的时差及震动定位算法以解算出震源位置。加速度传感器接收到的局部放大信号如图3所示。
图3 局部震动信号
Fig.3 Local vibration signal
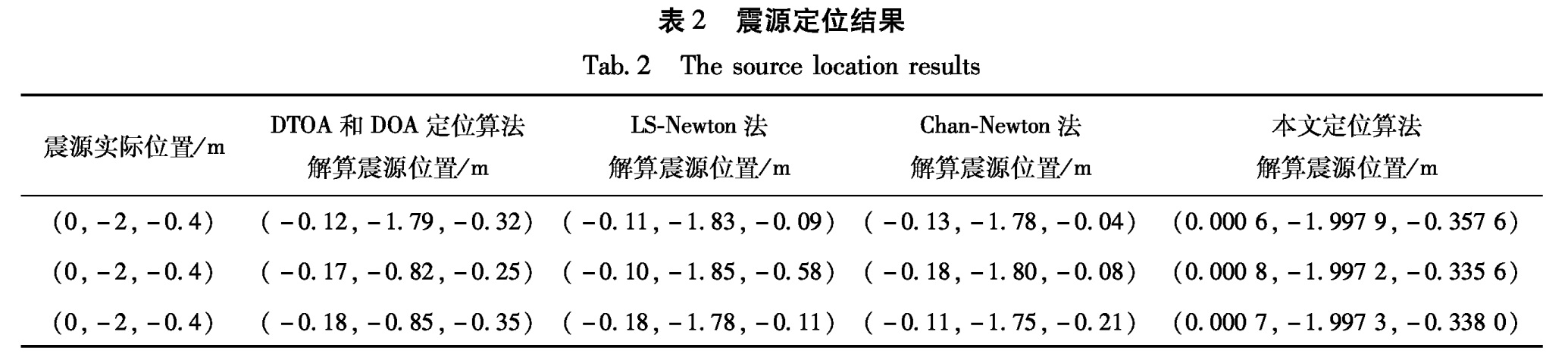
表2 震源定位结果
Tab.2 The source location results
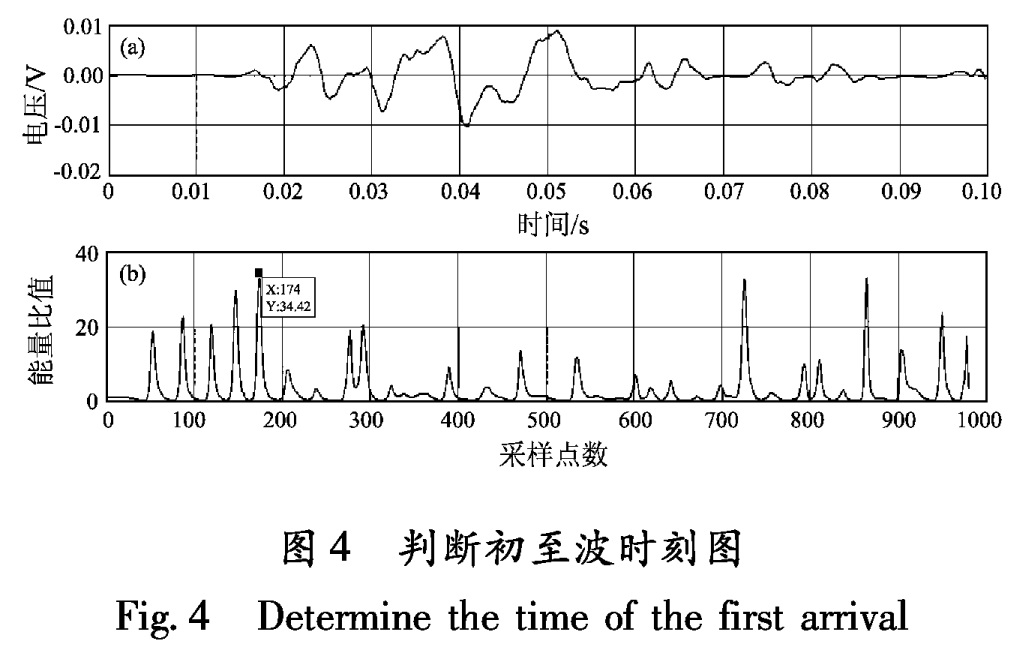
利用时窗能量比法判断初至波到时,对传感器1接收到的震动信号进行预处理及时窗能量比,如图4所示。
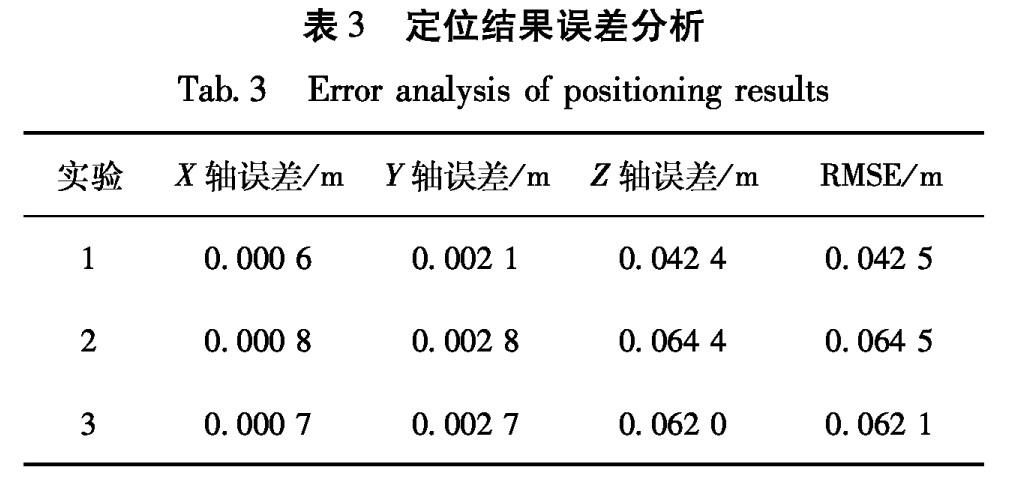
以同样的方法判断其它各传感器接收到的初至波到时,结合各传感器基站位置及定位算法解算出的震源位置如表2所示。对运用本文算法所得定位结果进行误差分析如表3所示。
在定位过程中,由于传感器基站的布设及埋深较浅,使得Z方向的误差较大,加之震动波在传播过程中引入的误差,传感器基站站址测量误差,初至波到时估计误差等因数影响导致震源位置与实际位置之间有偏差。
从表3可知,本文算法定位结果的均方根误差值远远小于DTOA和DOA联合定位、LS-Newton法及Chan-Newton法定位结果的均方根误差值,定位结果比较理想。
图4 判断初至波时刻图
Fig.4 Determine the time of the first arrival
表3 定位结果误差分析
Tab.3 Error analysis of positioning results