幅频特性与相频特性之间存在一定的内部联系,用频率响应表示强震动仪的动态特性时,主要是用幅频特性描述。输入波为正弦波信号时,对力平衡加速度计的动态性能多采用以下指标来
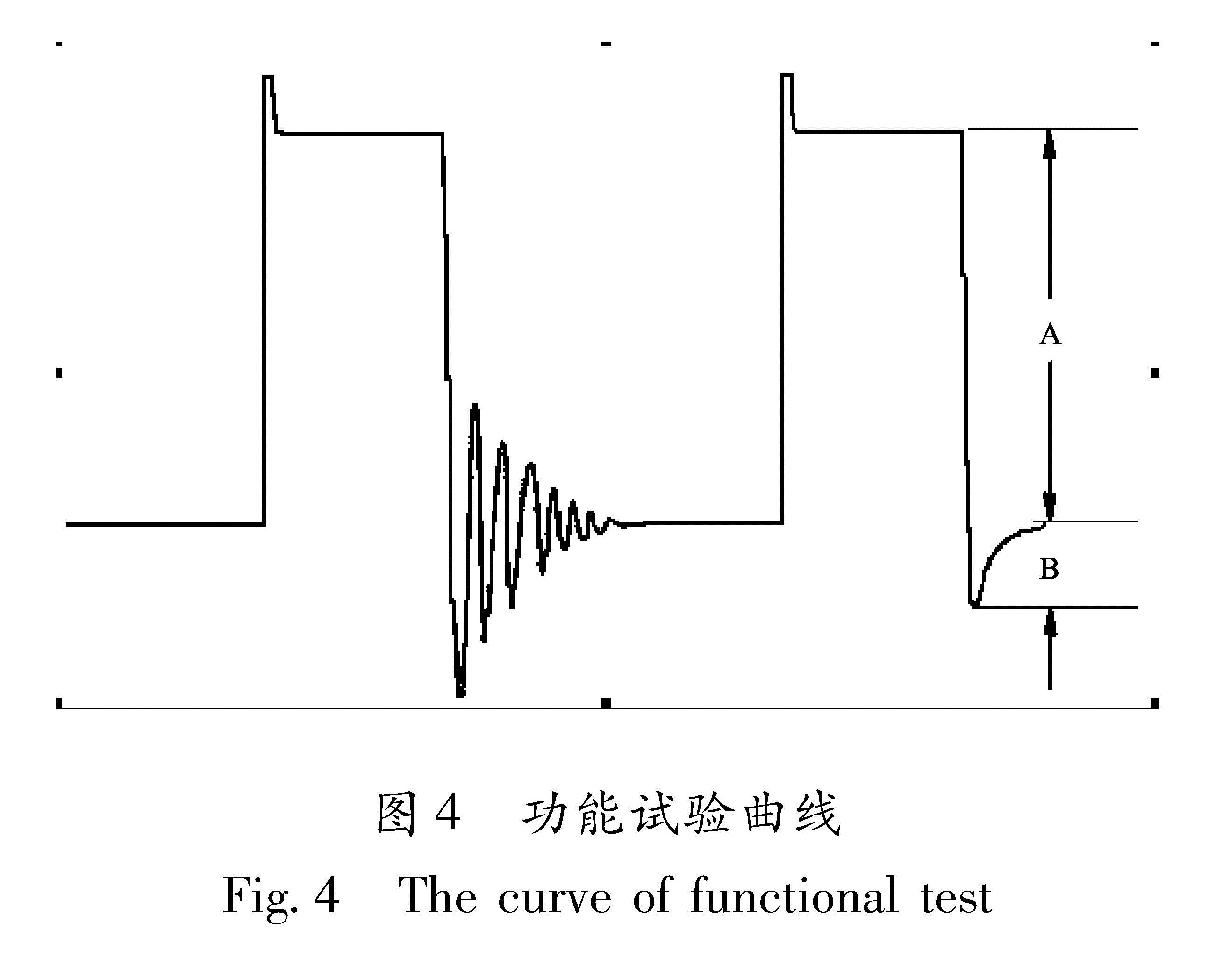
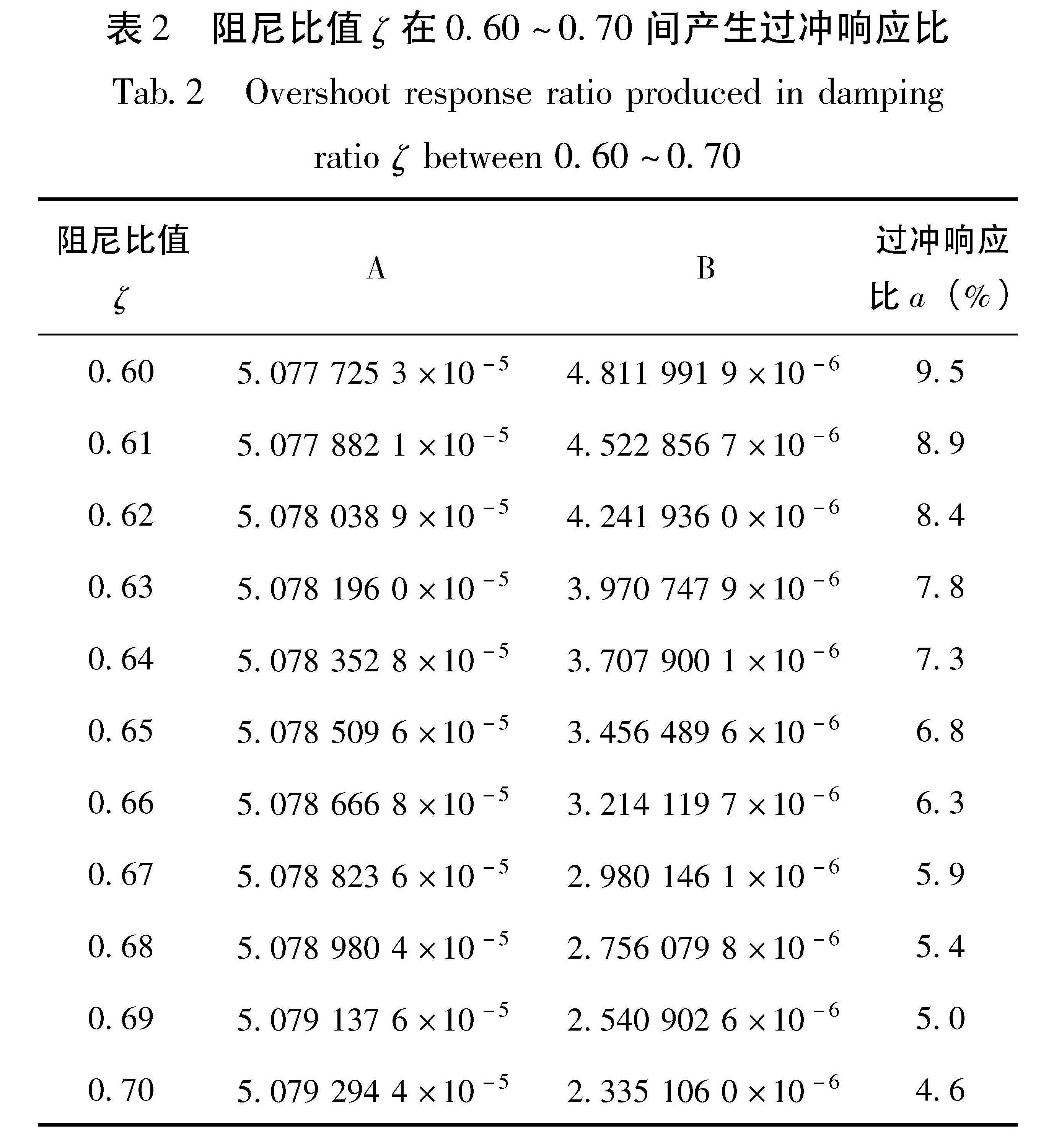
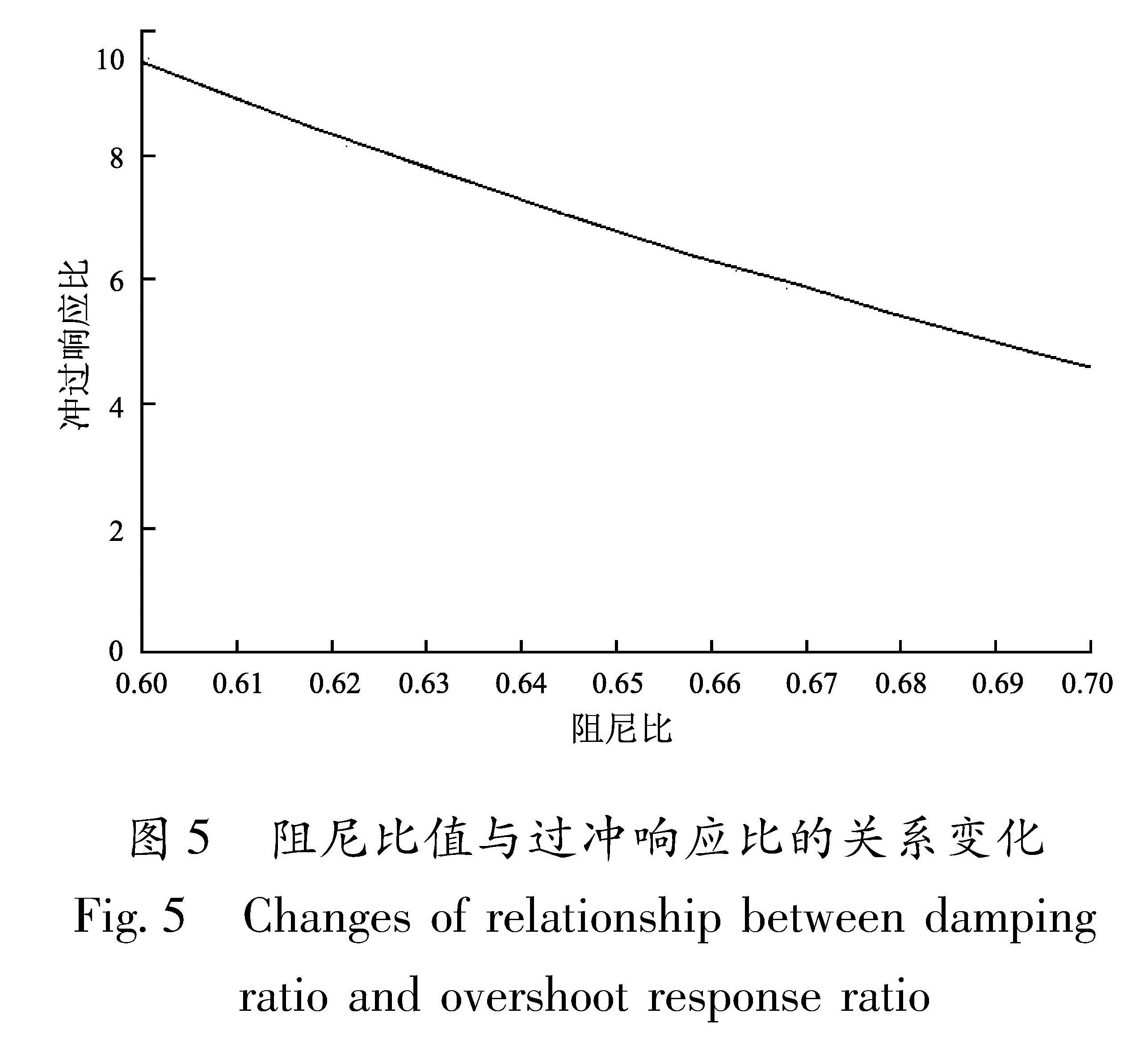
图5 阻尼比值与过冲响应比的关系变化
Fig.5 Changes of relationship between damping ratio and overshoot response ratio
表示:一是通频带; 二是工作频带; 三是相位误差。强震动仪的动态特性主要用幅频特性与相频特性来表征,其幅频特性与相频特性可由系统频率响应确定(李科杰,2002)。
对公式(11)作拉普拉斯变换可得
(1/(ωn)s2+(2ζ)/(ωn)s+1)Y(s)=kX(s),(13)
其中:Y(s)、 X(s)分别为y(t)、 x(t)的拉普拉斯变换, s为复变量。式(13)可整理为
H(s)=(Y(s))/(X(s))=k/(1/(ω2n)s2+(2ζ)/(ωn)s+1),(14)
其中,H(s)为传递函数,继而可得到频响函数为
H(jω)=k/(1-(ω/(ωn))2+j2ζ(ω/(ωn))),(15)
其中:j为虚数单位,且j=(-1)1/2。
由式(15)可导出幅频响应A(ω)和相频响应φ(ω),且
A(ω)=k/(([1-(ω/(ωn))2]2+4ζ2(ω/(ωn))2)1/2),(16)
φ(ω)=arctan(2ζ)/(ω/(ωn)-(ωn)/ω).(17)
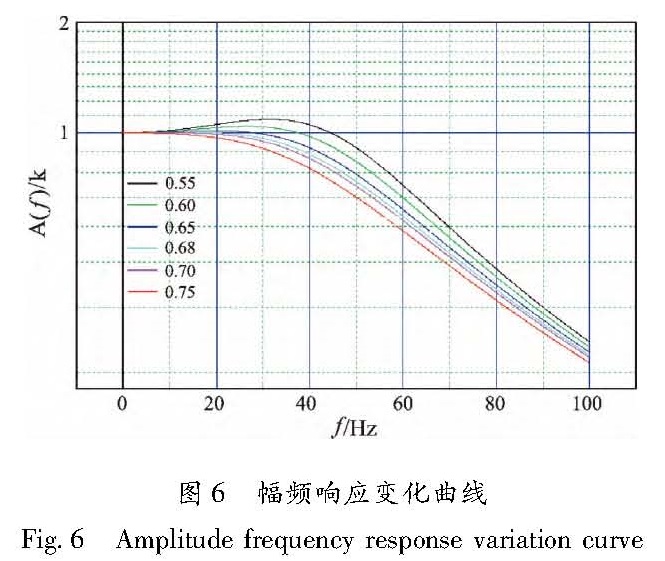
依据式(16)和式(17)计算出f=50 Hz时,阻尼比值ζ在0.55、0.60、0.65、0.68、0.70和0.75时对应产生的频率响应,并对幅频响应曲线进行归一化处理,见图6(Cyril,Allan,2007)。
图6 幅频响应变化曲线
Fig.6 Amplitude frequency response variation curve
图6中,当加速度传感器的阻尼比值ζ为0.65或0.68时,仪器的幅频曲线平坦段最长,其幅频特性最佳。当仪器的幅频响应下降至-3 dB,即A(f)/k=0.707为允许误差时,应根据该允许误差去确定整个系统的有效频带。由
图6可知,随着加速度传感器的阻尼比值ζ增大,有效频带会相对变窄,当阻尼比值ζ>0.70后,仪器的幅频响应直接下降至-3 dB以下(李德葆,陆秋海,2004)。因此,对特定的加速度传感器的性能校准工作来讲,若按传感器的幅频响应平坦性要求,必须将加速度传感器的阻尼比值设定在0.65≤ζ≤0.70范围内(李海亮,2000)。
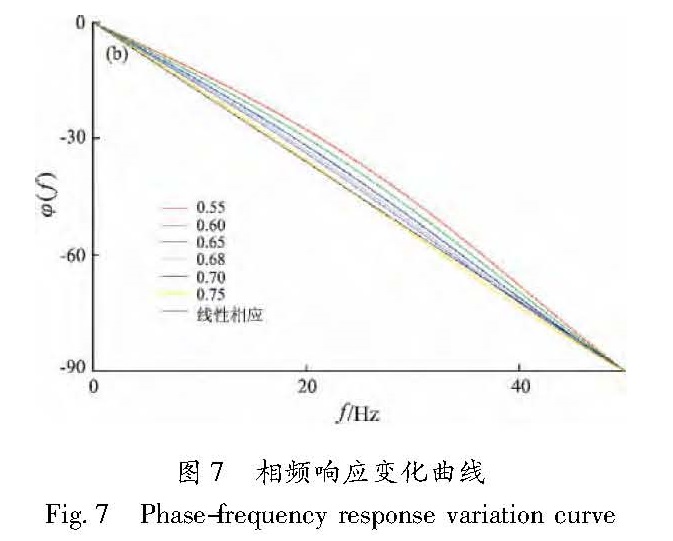
在已知工作频带范围内,相位误差大小应控制在5°~10°。从不同阻尼比值对应的相频响应曲线变化中,找到相频曲线的失真度,即可确定相频特性可用误差范围。图7黑线表示加速度传感器的完全线性相位曲线,分析表明,加速度传感器的阻尼比值ζ由0.65依次递增至0.75时,传感器的相位变化越加接近线性。
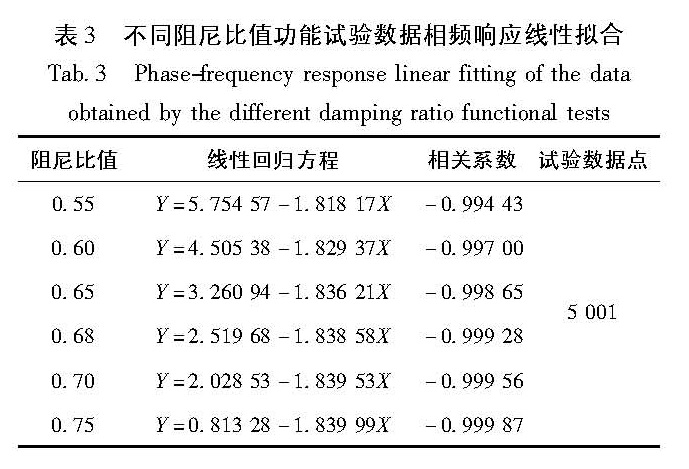
分别对功能试验中阻尼比值为0.55、0.60、0.65、0.68、0.70和0.75的相频响应数据进行最小二乘线性拟合,通过试验数据点与其拟合程度得到相关系数R,若R值接近±1,则表示试验数据相关度高,拟合程度好,具体计算数据见表3。
图7 相频响应变化曲线
Fig.7 Phase-frequency response variation curve
表3 不同阻尼比值功能试验数据相频响应线性拟合
Tab.3 Phase-frequency response linear fitting of the data obtained by the different damping ratio functional tests
已知第i个测量数据点与拟合直线间偏差值为Δ
i=y
i-(a+bx
i),其中i=1,2,3,…,5 001。根据不同阻尼比值的最大偏差X
max与平均偏差X^-,求得(X
max-X^-
i)/(X^-
i),计算出最大失真度为最大偏差与最大输出相位值比(Δ
max)/(Y
ES)×100%,即可分析评价仪器相频响应的线性特征,具体计算结果如
表4所示。
表4 不同阻尼比值功能试验数据相频响应失真度分析
Tab.4 Phase-frequency response distortion degree analysis of the data obtained by the different damping ratio functional tests
相位是否呈线性状态与相关系数R、最大偏差值、平均偏差值有关。分析
表3和
表4数据可知,仪器的阻尼比值从0.55增大到0.75时,相关系数从-0.994 43逐渐增大为-0.999 87,即阻尼比值增加,其相位线性特征越来越明显; 根据最大偏差值与平均偏差值计算出(X
max-X^-
i)/(X^-
i)值也由1.494 1逐渐增大为2.226 9,即(X
max-X^-
i)/(X^-
i)值越大,相位越趋于线性变化。由相位变化趋势可知,随着阻尼比值由0.55增大为0.75时,相位的失真度由5.006%减小为1.318%。可见,仪器阻尼比值越大,相频响应曲线越不易失真。
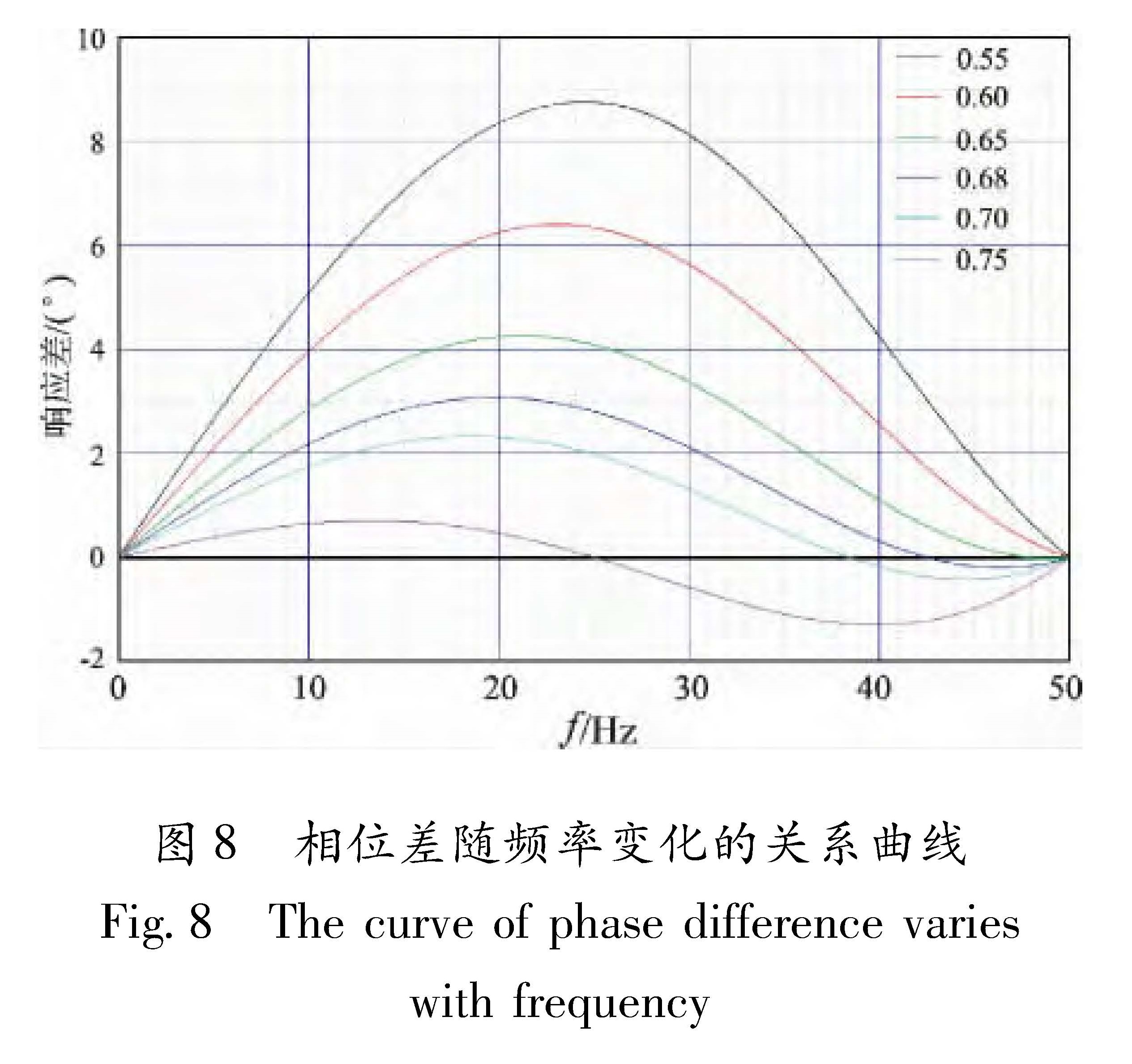
图8 相位差随频率变化的关系曲线
Fig.8 The curve of phase difference varies with frequency
图8表示在不同的阻尼比值下,各相频响应曲线与完全线性相位之差的变化关系曲线。当阻尼比值ζ=0.55时,其相频响应曲线与完全线性相位之差接近9°,随着阻尼比值缓缓增大,产生的相频响应曲线与完全线性相位之差逐步减少,当阻尼比值ζ=0.75时,其相频响应曲线与完全线性相位之差仅是1°。根据传感器的相频响应特性要求,非线性相位与线性相位差在3°以内,其产生的系统相频响应误差可忽略不计。因此,仪器阻尼比值设置为0.68≤ζ≤0.75范围内较合适。
以相频响应曲线特征为依据评价强震动仪的工作性能,需保证相位失真度在5%范围内,由试验可见,阻尼比值为0.68、0.70和0.75的相频响应曲线几乎可完全线性化,其中,阻尼比值0.75的响应曲线线性化最佳。因此,SLJ-100型力平衡式加速度传感器的阻尼比值选择在0.68~0.70范围内最佳。