收稿日期:2014-02-25
基金项目:国家科技支撑计划课题(2012BAK19B04)和中国地震局地震科技星火计划攻关项目(XH12029)联合资助.
基金项目:国家科技支撑计划课题(2012BAK19B04)和中国地震局地震科技星火计划攻关项目(XH12029)联合资助.
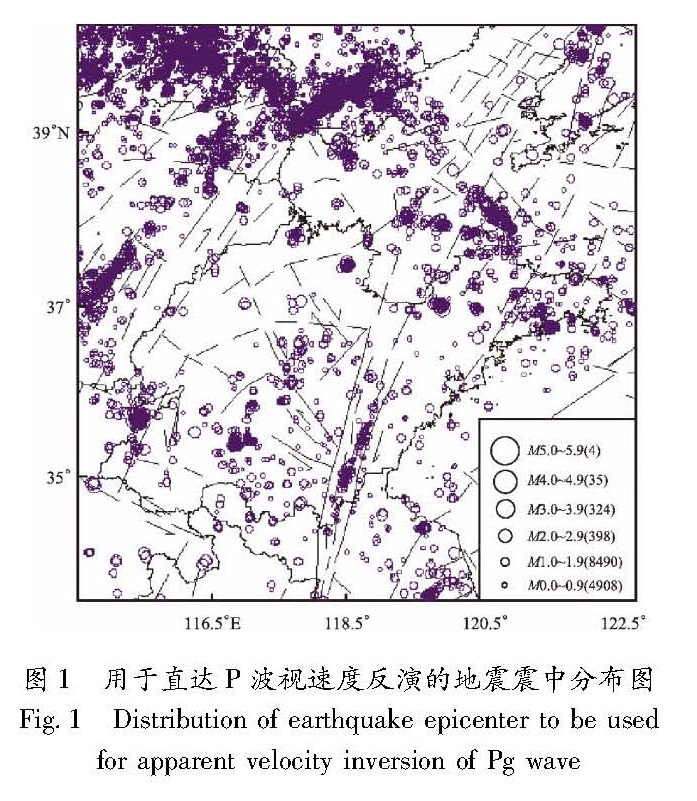
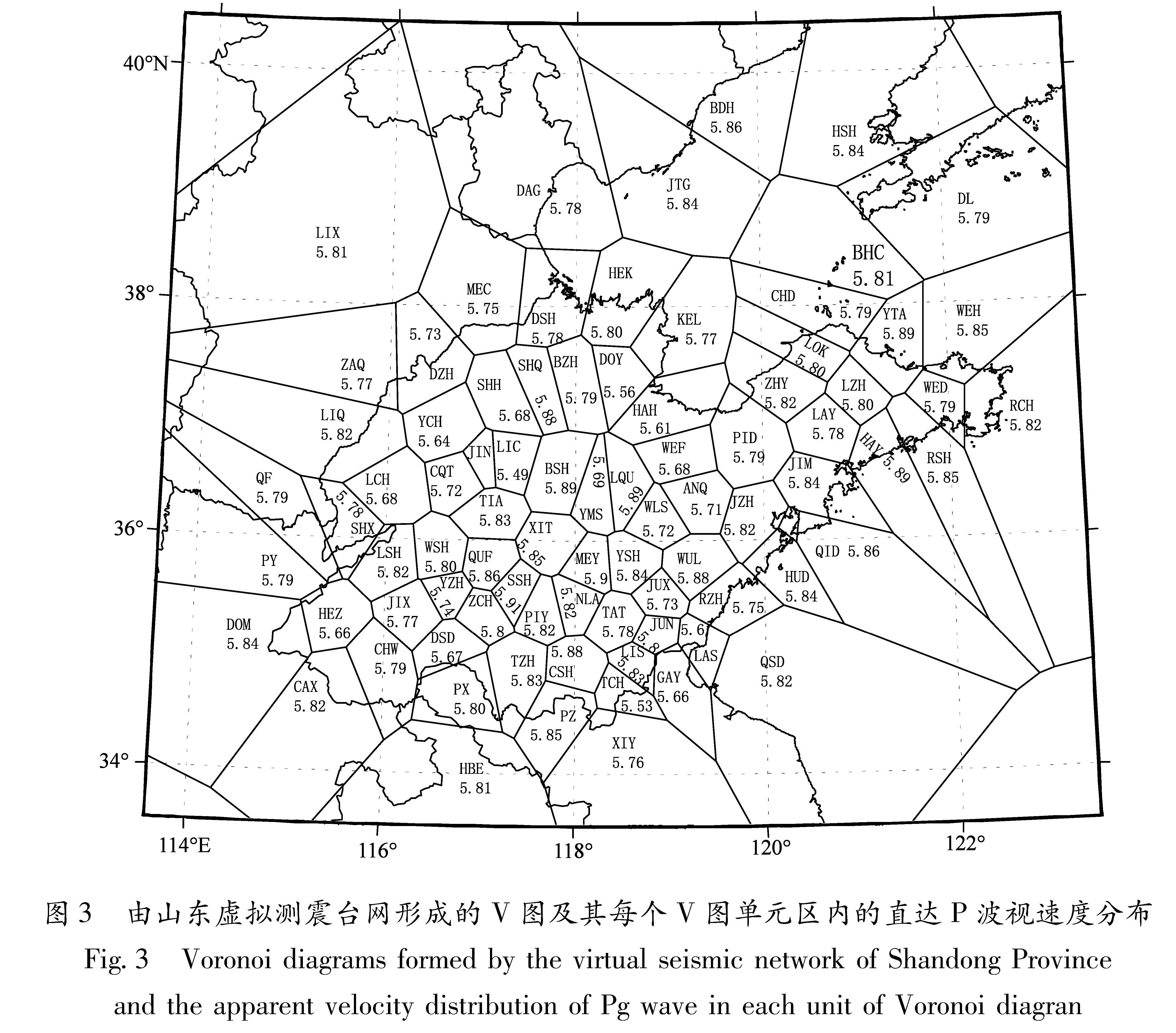
针对基于3个台站Pg震相进行震中定位时有时存在误差较大、不稳定等现象,通过分析区域速度模型差异、台站的几何分布对震中定位精度的影响,结合山东虚拟测震台网,给出了接近实际的直达Pg波视速度结构,提出了三台震中定位的综合解决方案。对2009~2013年山东虚拟测震台网内1 555次地震的震中定位结果表明,应用三台定位方法得到的震中定位误差平均为8.7 km(与台网定位结果相比),提高了震中定位的精度,减少了震中不能确定的概率。
Aiming at the phenomenon of the larger error and instability that exits in the epicenter location based on Pg onsets of three stations,combined with virtual seismic network of Shandong Province,we analyze the influence of the difference of regional velocity structure and geometric distribution of stations on locating precision of epicenter,and give the apparent velocity model of direct Pg wave to put forward the integrated solutions scheme on epicenter location based on Pg onsets of three stations. The epicenter location results of 1 555 earthquakes recorded by the virtual seismic network of Shandong Province from 2009 to 2013 indicates that the average error of epicenter location is 8.7 km by Pg onsets of three stations(compared with the epicenter location in network),which can improve the precision of epicenter location and deduce the probability of epicenter cannot be determined.


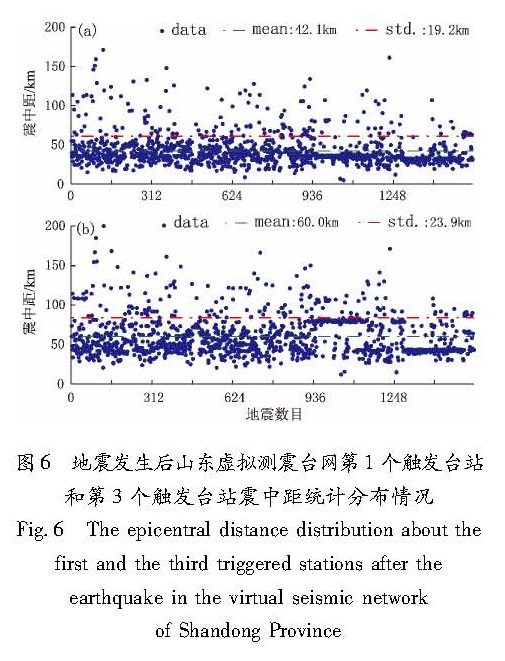
分布及2009至2013年期间网内地震分布(空心圆圈)<br/>Fig.4 Distribution of stations in virtual seismic network of Shandong Province(solid triangle)and epicenter distribution inside the network from 2009 to 2013(hollow circle)") 图4中地震发生后前3个触发台站拟合优度分布情况
图4中地震发生后前3个触发台站拟合优度分布情况