为进一步分离GNSS站坐标时间序列所包含的有色噪声,我们采用小波变换的方法。小波分析可以提取时间序列的时频特征,具有分析信号的局部特征和多尺度分辨率的特点,借助小波方法可以将不同特性的噪声进行分离与估计(飞思科技产品研发中心,2005)。
设f(t)是观测点变形序列,采用Mallat算法,将信号分解成不同频率成分:
Aj-1f(x)=Ajf(x)+Djf(x).(3)
其中,信号在空间Vj上的投影为
Ajf(t)=∑k∈ZCj,kφj,k(x).(4)
在空间Wj上的投影为
Dj(x)=∑k∈ZDj,kψj,k(x).(5)
其中,Aj-1 f(x)和Aj f(x)分别是信号f(x)的频率不超过2-j+1和2-j的成分,而Dj f(x)是频率介于2-j与2-j+1之间的成分。
上述小波分解式实际可写成如下的矩阵形式:
Cj+1=HCj
Dj+1=GCj,(j=1,2,…,J).(6)
式中:H是尺度函数对应的低通滤波器,H=(hk-2n); G是小波函数对应的带通滤波器,G=(gk-2n); Cj是2j在分辨率下的离散逼近; Dj是2j在分辨率下的离散细节; {hk}k∈Z和{gk}k∈Z是一对离散正交镜像滤波器(低通和高通)。式(6)即为Mallat塔式分解算法。
小波变换要求数据是等间隔采样的,而GNSS时间序列的日观测值中有一定的数据缺失,我们采用最小二乘配置方法对GNSS时间序列进行插值。由于最小二乘配置方法不像谱分析或是小波变换要求数据等间隔,其数据输入可以较为松散,而其输出可以根据需求决定是否等间隔(武艳强等,2007)。这就决定了该方法可以作为谱分析、小波变换等方法的预处理过程。即先由最小二乘配置输出滤波、插值后的等间隔值,然后再由其它方法进行后继处理。
武汉大学测绘学院测量平差学科组(2009)详细论述了最小二乘配置,其误差方程为
{V=BZZ^+GY^ -L,
VZ=Z^-LZ.(7)
式中,BZ为信号的系数阵(通常观测点部分为单位阵,推估点部分为零阵),Z^为随机信号估值(包括观测点和推估点),G为经典平差问题的系数阵,Y^为经典平差问题需要求解的待定参数,L为观测值,LZ为信号的虚拟观测值(一般为信号的数学期望)。
根据间接平差理论和矩阵反演理论对式(7)进行求解得到
{Y^={GT(DX+DΔ)-1}-1GT(DX+DΔ)-1L,
Z^=DZ(DX+DΔ)-1(L-GY^). (8)
式中,DX为已测点信号的协方差阵,DΔ为观测值的协方差阵。
应用最小二乘配置方法的前提是获取信号的协方差阵,推荐使用如式(9)的高斯经验协方差函数:
f(t)=Ae-k2t2.(9)
式中,t为时间间隔,A和k为待定参数。采用赫尔默特方差估计方法获得参数A,而对于参数k,可以根据关注的信息频段人为设定。如果k值较大,得到的信息就接近于原始序列; 如果k值较小,得到的信息就是相对低频的数据。
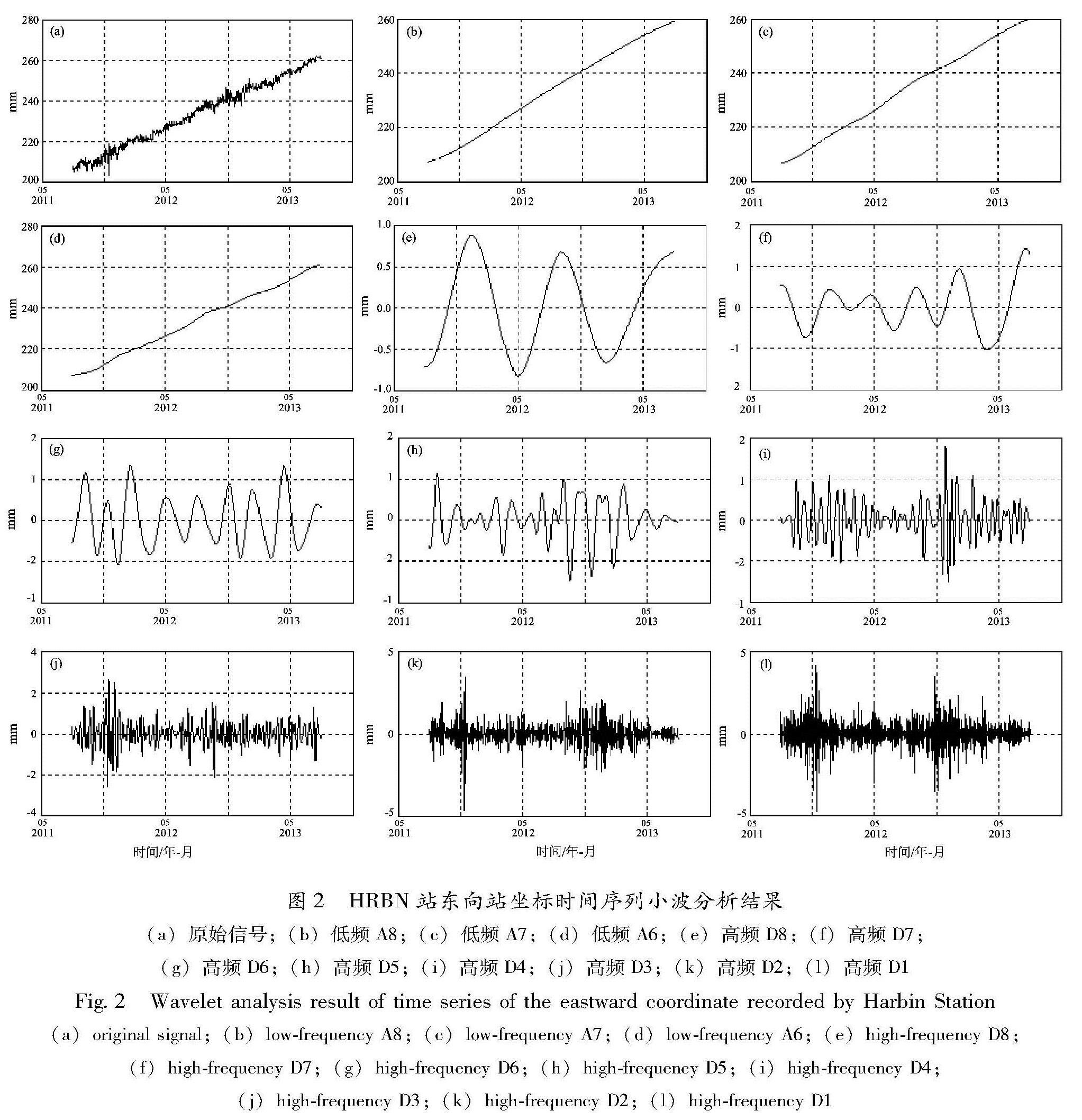
对最小二乘配置插值后的数据采用具有对称性和正则性的sym8小波进行小波分解(张风霜,杨国华,2011)。以2011~2013年哈尔滨站东向站坐标时间序列小波分解的结果为例(图2),随着阶数的增加,信号的细节部分从最高频向低频分解,当阶数为0时,信号为采样频率; 当阶数为1时,频率二等分,对于GNSS连续观测时间序列,1阶信号的周期为1~2 d,同样,2阶信号的周期为2~4 d,以此类推,当阶数为8时,8阶信号的周期为128~256 d。研究表明,GNSS时间序列小波分解的1~3阶的高频信号主要是白噪声,4、5阶的高频信号主要是闪烁噪声,6、7阶的高频信号主要是随机漫步噪声(杨国华等,2007; 杨博等,2010)。
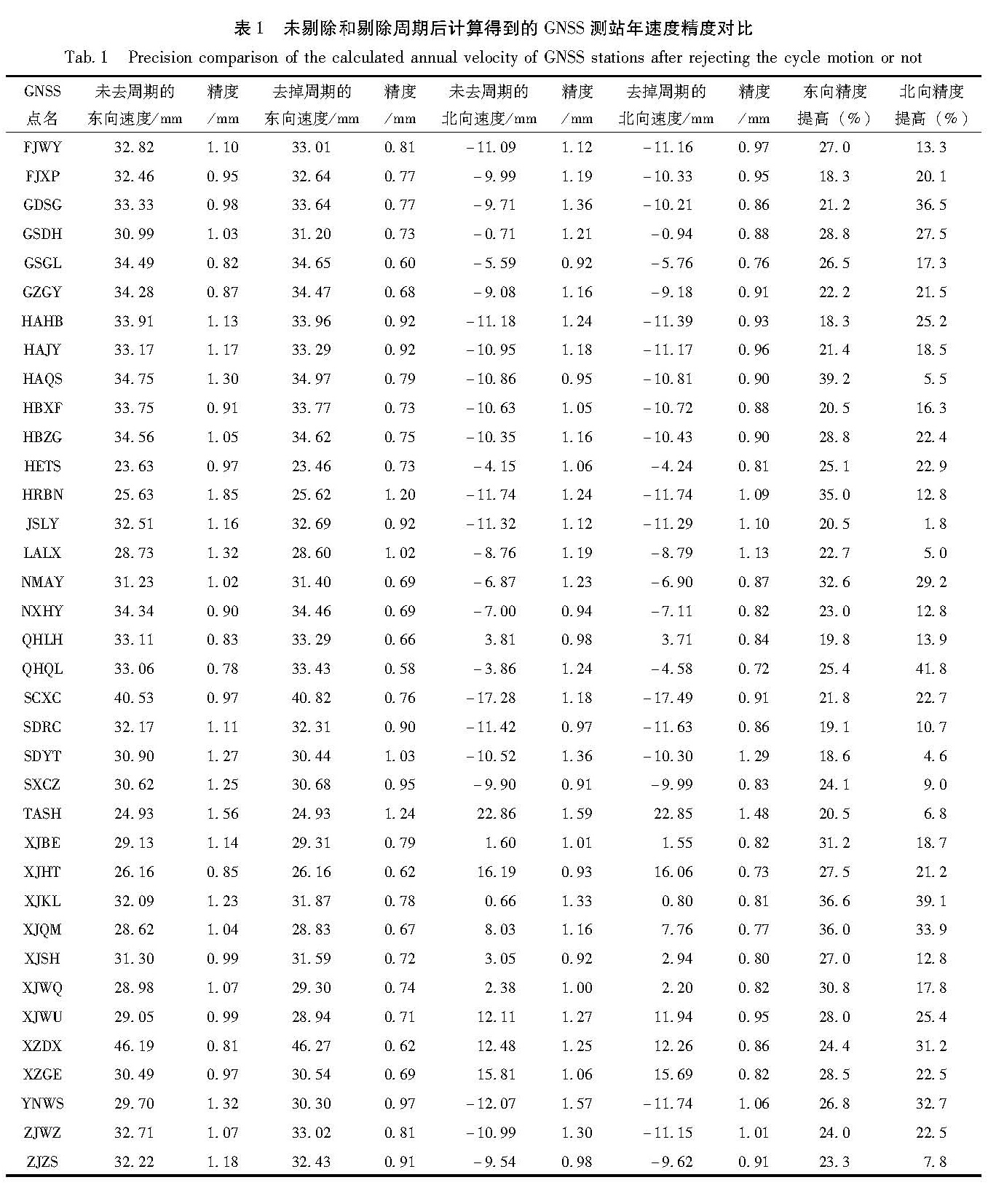
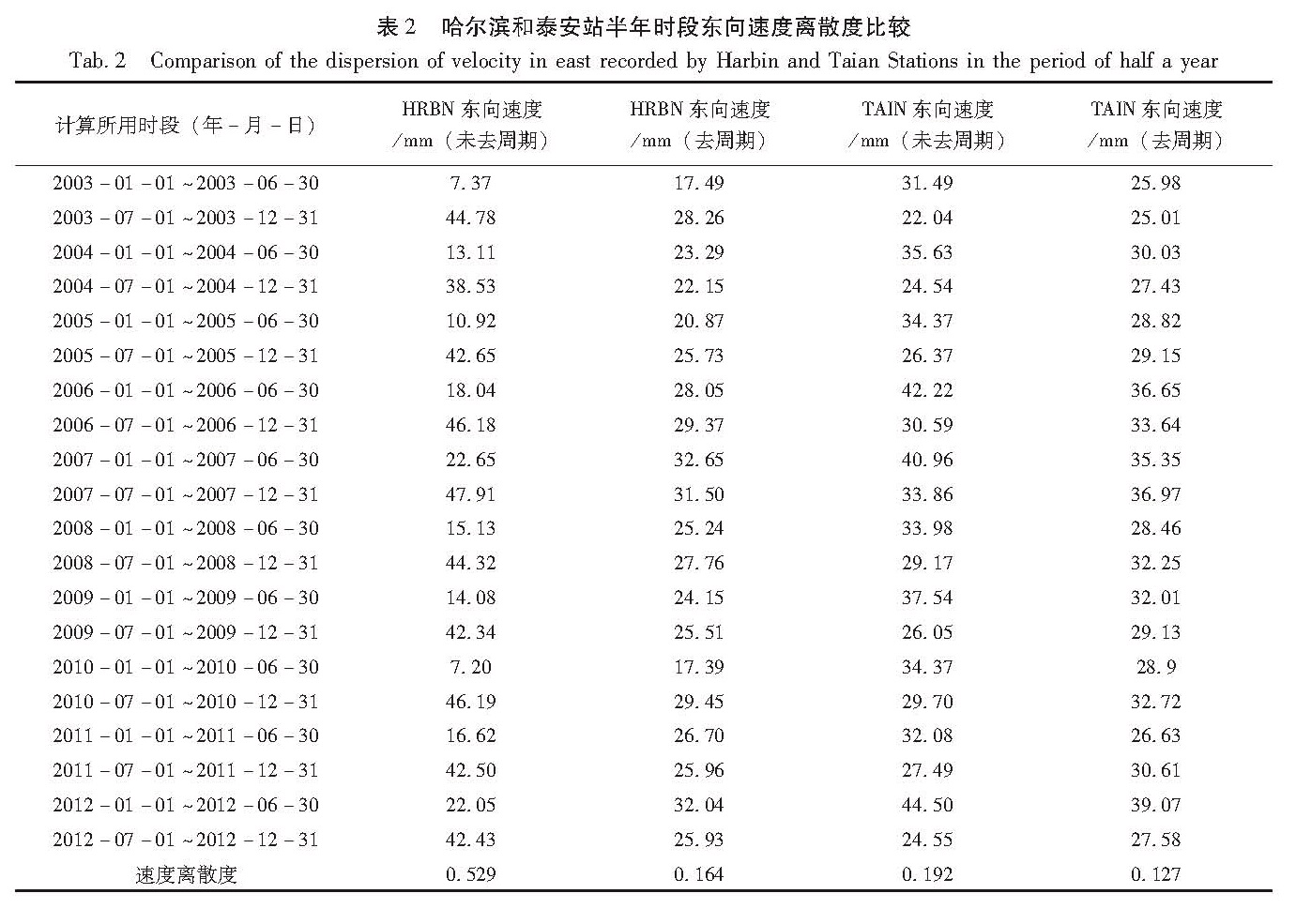
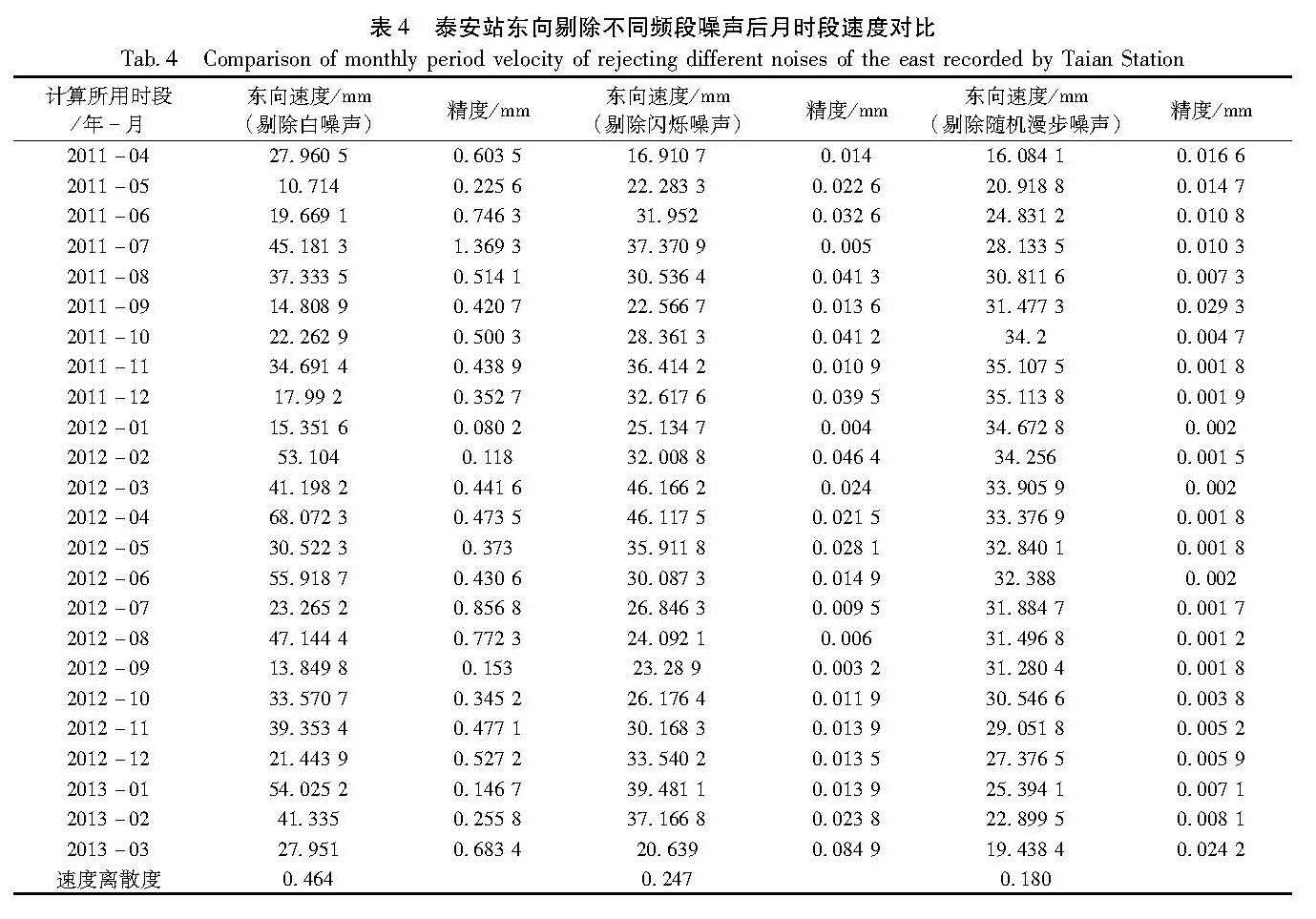
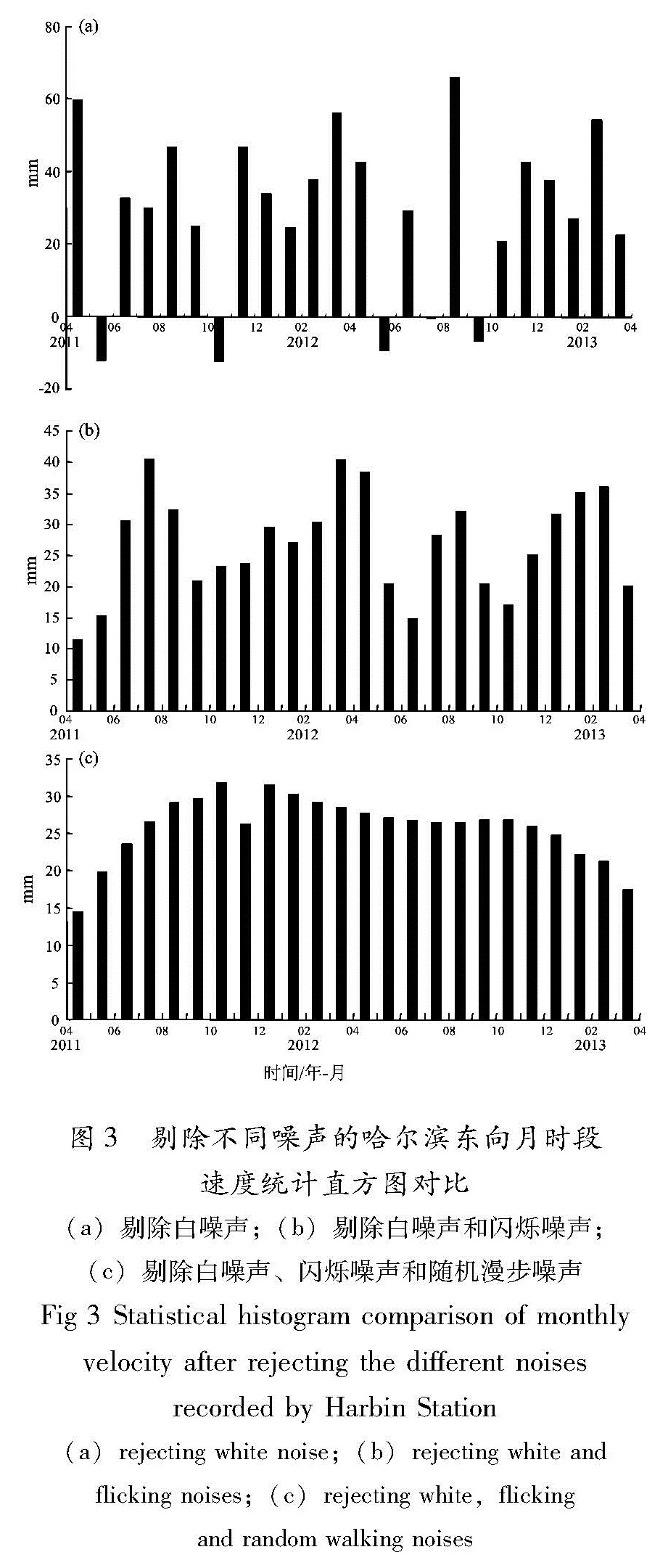
对哈尔滨站和泰安站已剔除年周期和半年周期的东向站坐标时间序列,分别剔除白噪声、闪烁噪声和随机漫步噪声后再计算2011年4月初至2013年3月底(共24个月)各月时段速度,结果见表3、图4和图3。由图3可见,随着白噪声、闪烁噪声和随机漫步噪声的逐步剔除,24个月各月的速度由离散逐步趋于稳定。由表3、4可知,只剔除白噪声,计算得到的哈尔滨站和泰安站24个月的各月速度离散度较大,分别为0.795和0.464,说明各月速度并不稳定,进一步剔除闪烁噪声后,哈尔滨站和泰安站的月速度离散度分别减小至0.307和0.247,再进一步剔除随机漫步噪声后,哈尔滨站和泰安站离散度分别进一步减小至0.165和0.180,说明剔除白噪声、闪烁噪声、随机漫步噪声后得到的月时段速度较稳定。
图2 HRBN站东向站坐标时间序列小波分析结果
(a)原始信号;(b)低频A8;(c)低频A7;(d)低频A6;(e)高频D8;(f)高频D7;
(g)高频D6;(h)高频D5;(i)高频D4;(j)高频D3;(k)高频D2;(l)高频D1
Fig.2 Wavelet analysis result of time series of the eastward coordinate recorded by Harbin Station(a)original signal;(b)low-frequency A8;(c)low-frequency A7;(d)low-frequency A6;(e)high-frequency D8; (f)high-frequency D7;(g)high-frequency D6;(h)high-frequency D5;(i)high-frequency D4; (j)high-frequency D3;(k)high-frequency D2;(l)high-frequency D1
表3 哈尔滨站东向剔除不同频段噪声后月时段速度对比
Tab.3 Comparison of monthly velocity in east after rejecting different noises recorded by Harbin Station
表4 泰安站东向剔除不同频段噪声后月时段速度对比
Tab.4 Comparison of monthly period velocity of rejecting different noises of the east recorded by Taian Station
图3 剔除不同噪声的哈尔滨东向月时段
速度统计直方图对比
(a)剔除白噪声;(b)剔除白噪声和闪烁噪声;
(c)剔除白噪声、闪烁噪声和随机漫步噪声
Fig 3 Statistical histogram comparison of monthly velocity after rejecting the different noises recorded by Harbin Station (a)rejecting white noise;(b)rejecting white and
flicking noises;(c)rejecting white,flicking and random walking noises