收稿日期:2014-10-09
基金项目:国家自然科学基金项目(51178368,51278393,51478372)资助.
基金项目:国家自然科学基金项目(51178368,51278393,51478372)资助.
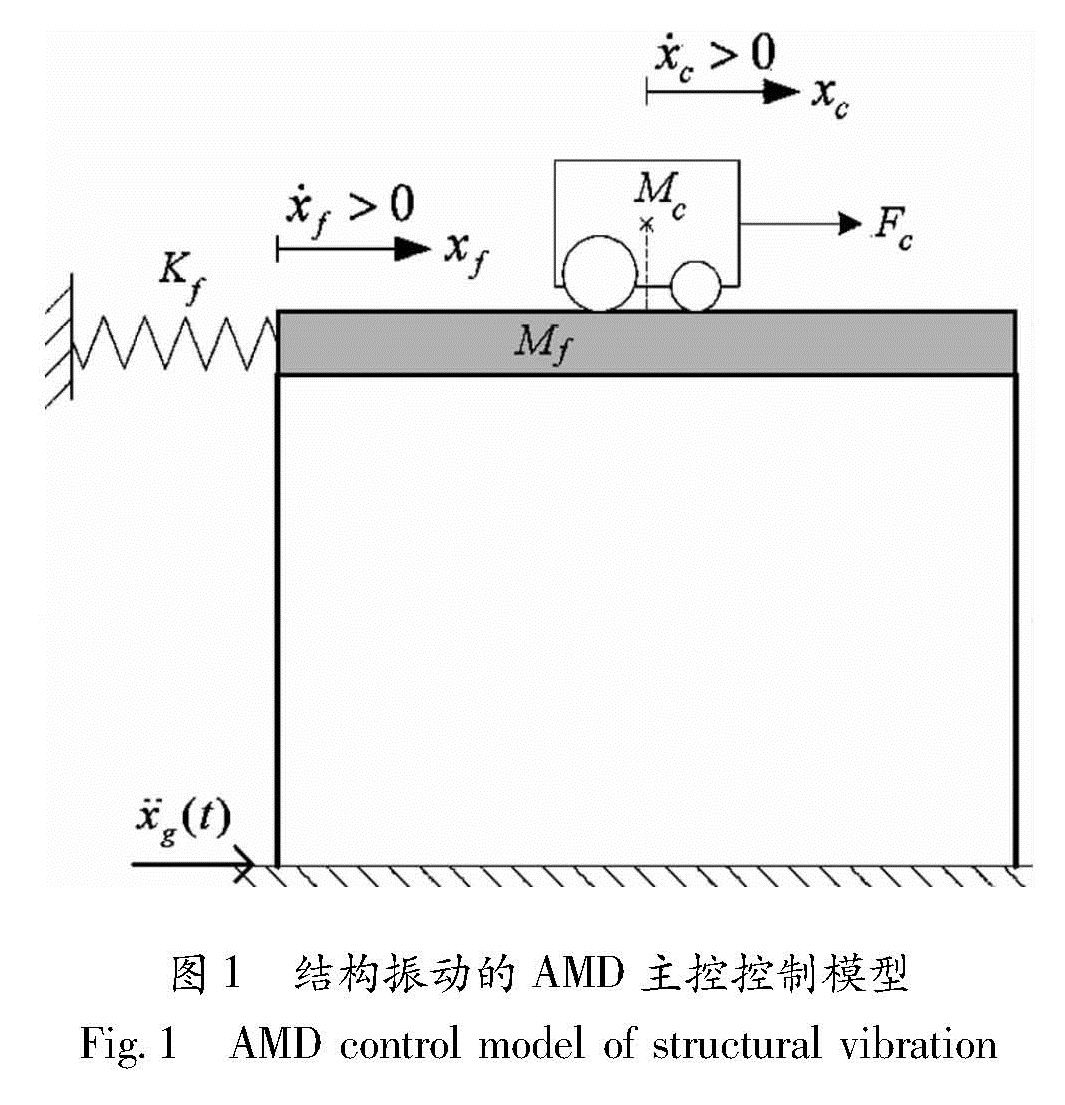
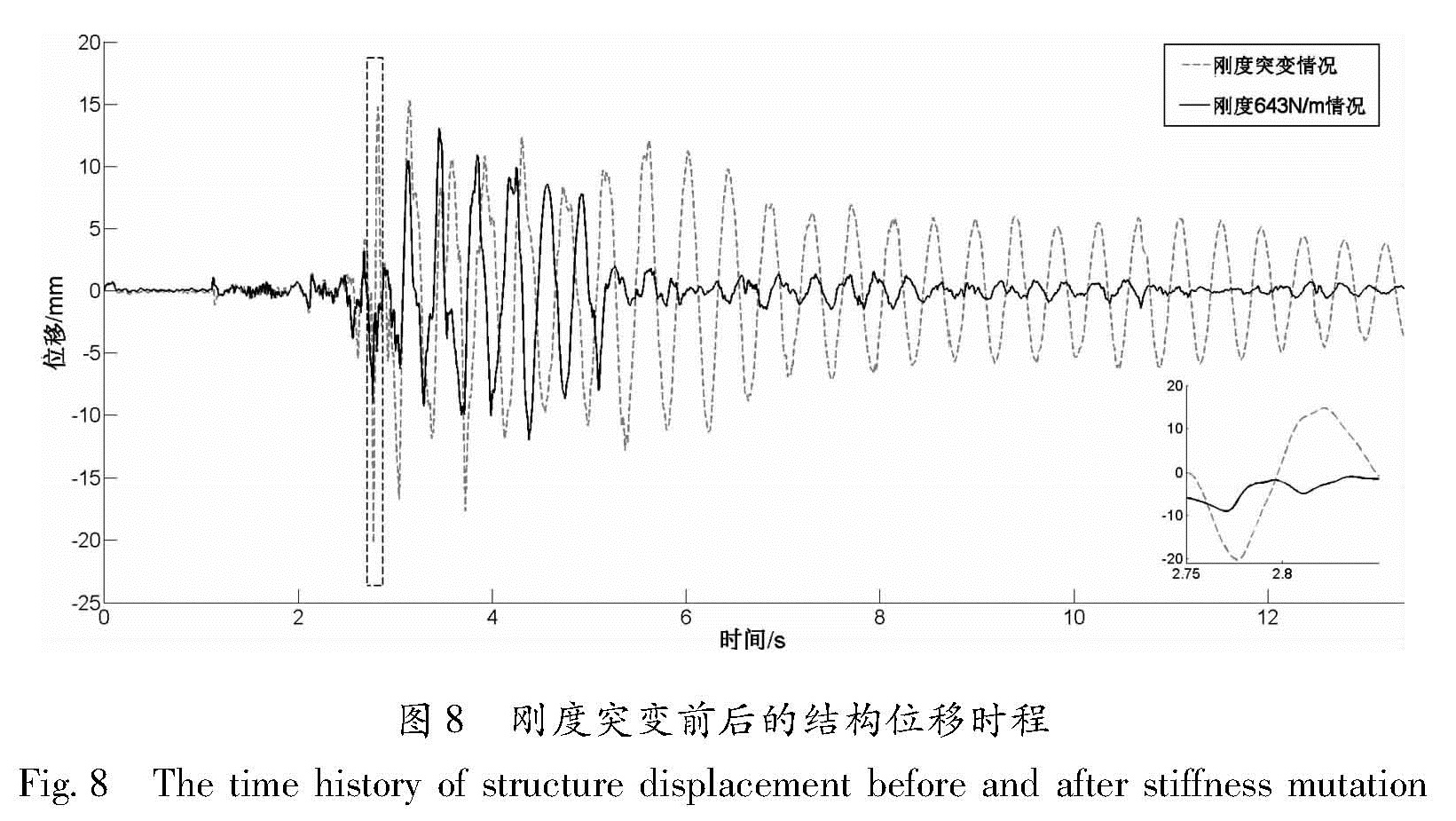
控制算法决定着振动控制的稳定性和减振效果,是结构AMD主动控制的核心组成部分。将最小控制综合(MCS)自适应算法运用于AMD控制结构系统,该算法不要求事先知道受控结构的精确力学模型和参数,且在受控结构进入非线性状态下也能达到很好的控制效果。利用拉格朗日方程推导了采用MCS算法的非线性结构AMD系统的控制方程; 在小型振动台上对刚度突变结构进行了控制试验。试验结果表明:采用MCS自适应算法的AMD系统可以有效地减小刚度突变结构响应,并且可让实际结构响应与参考模型预期响应保持一致,达到满意的减振效果。
The control equation of the AMD system using Minimal Controller Synthesis(MCS)adaptive algorithm for nonlinear structure is deduced by the Lagrangian method. Controlling experiment is carried out for the structure of stiffness mutation on the Shake Table II and the experimental results show that the AMD system using MCS adaptive algorithm can effectively reduce the structural response of stiffness mutation,and make the real structural response keep consistent with the expected response of reference model to achieve the approving damping effect.