2.1 试验概况
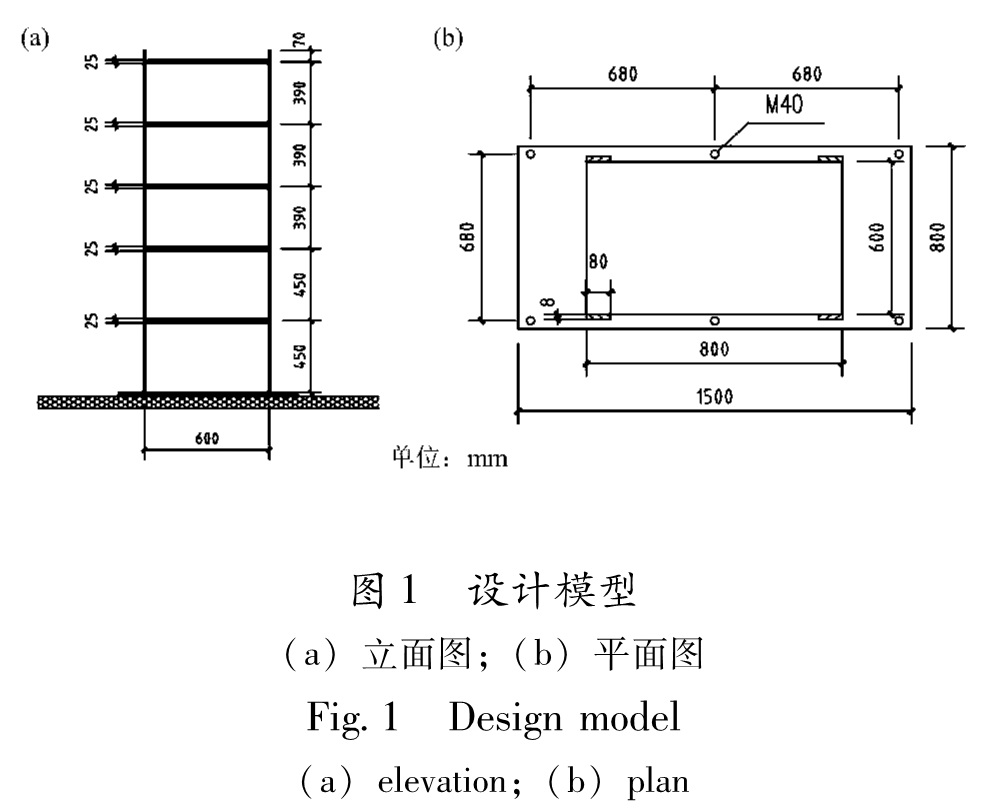
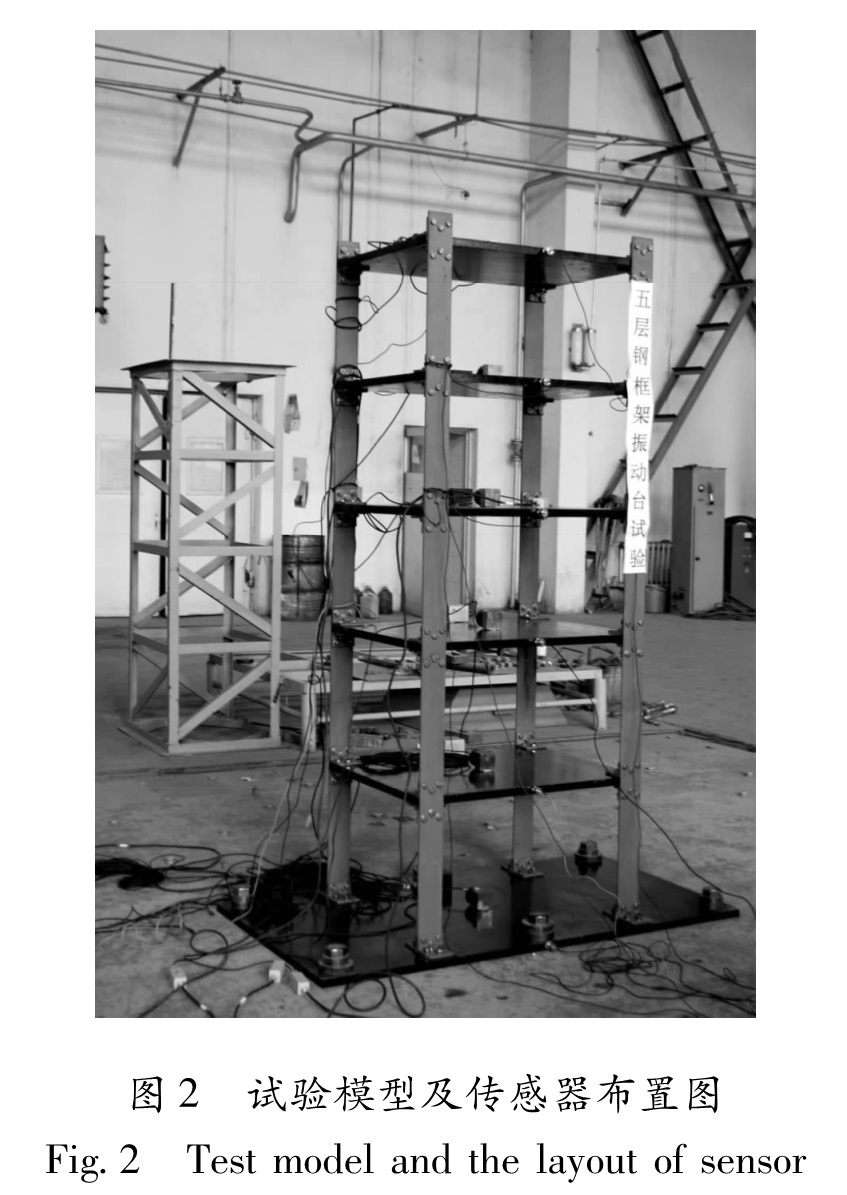
本文设计了一个5层单跨钢框架结构试验模型(模型立面图和平面图如图1所示; 实际模型及传感器布置如图2所示),进行振动台试验(振动台振动方向为图1a立面图平面内左右方向,也即图1b平面图平面内上下方向; 柱子尺寸为图1b中楼板两侧的4根横截面8 mm×80 mm钢板柱),以测试剪切型结构在地面运动作用下的动力响应,验证结构物理参数时域识别的改进的复合反演算法。
(a)立面图;(b)平面图
Fig.1 Design model
(a)elevation;(b)plan
Fig.2 Test model and the layout of sensor
试验采用的传感器型号(制造单位或品牌):位移计为SW-1型相对位移传感器(中国地震局工程力学研究所); 速度计为941B型拾振器(中国地震局工程力学研究所); 加速度计为LC0405T型压电传感器(朗斯); 放大器为CA-3积分电荷放大器(北戴河电子仪器厂); 数据采集系统为太平洋6000数采系统(太平洋设备公司); 采集软件为PI66o(太平洋设备公司)。
采用集中质量法,试验模型各层的质量为:m1=102.585 6 kg,m2=101.986 6 kg,m3=m4=101.387 5 kg,m5=98.891 5 kg。假定阻尼为Rayleigh比例阻尼,在振动台试验之前先进行模态试验,采用初位移法(顶层钢板施加)和初速度法(第3、4层钢板之间施加)分别确定模型结构沿该方向第一、第二阶振型,并确定相应频率和阻尼比。由模态分析的结果计算出Rayleigh阻尼系数为:α=0.439 193 075; β=0.000 354 87。
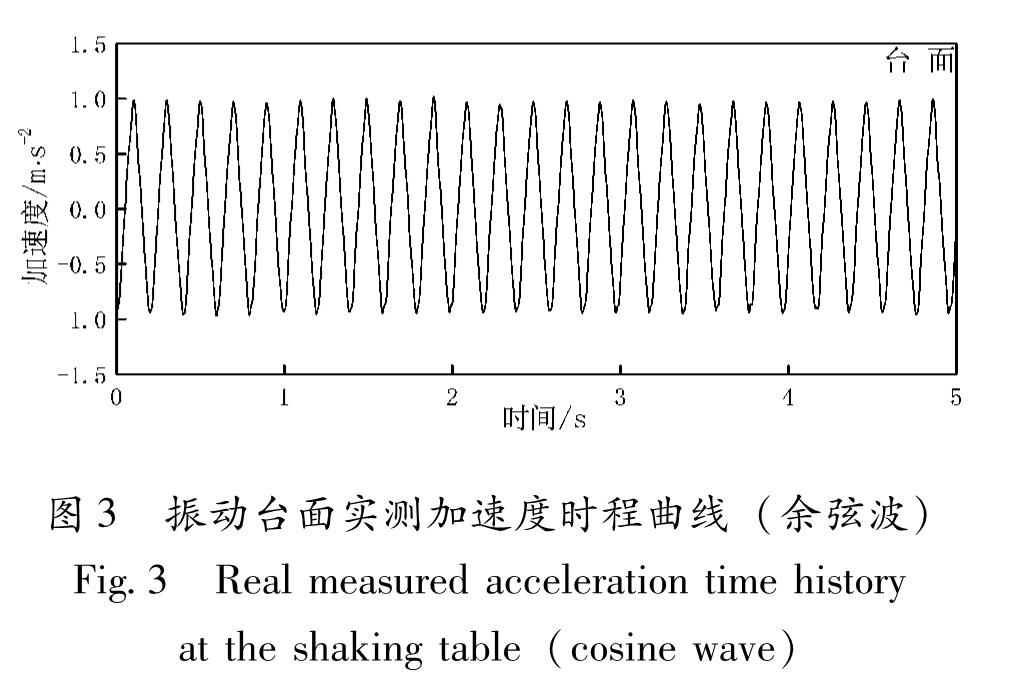
本文分别以峰值为0.48 g的EL Centro地震波和峰值为0.1 g、频率为5 Hz的余弦波为激励输入进行振动台试验,测试获得结构模型各层的加速度响应时程(速度及位移响应测试仅用于试验数据重构信息的比较),然后假定输入信息未知,采用改进的复合反演算法进行结构物理参数的时域识别和基底输入的反演研究。
Fig.3 Real measured acceleration time history
at the shaking table(cosine wave)
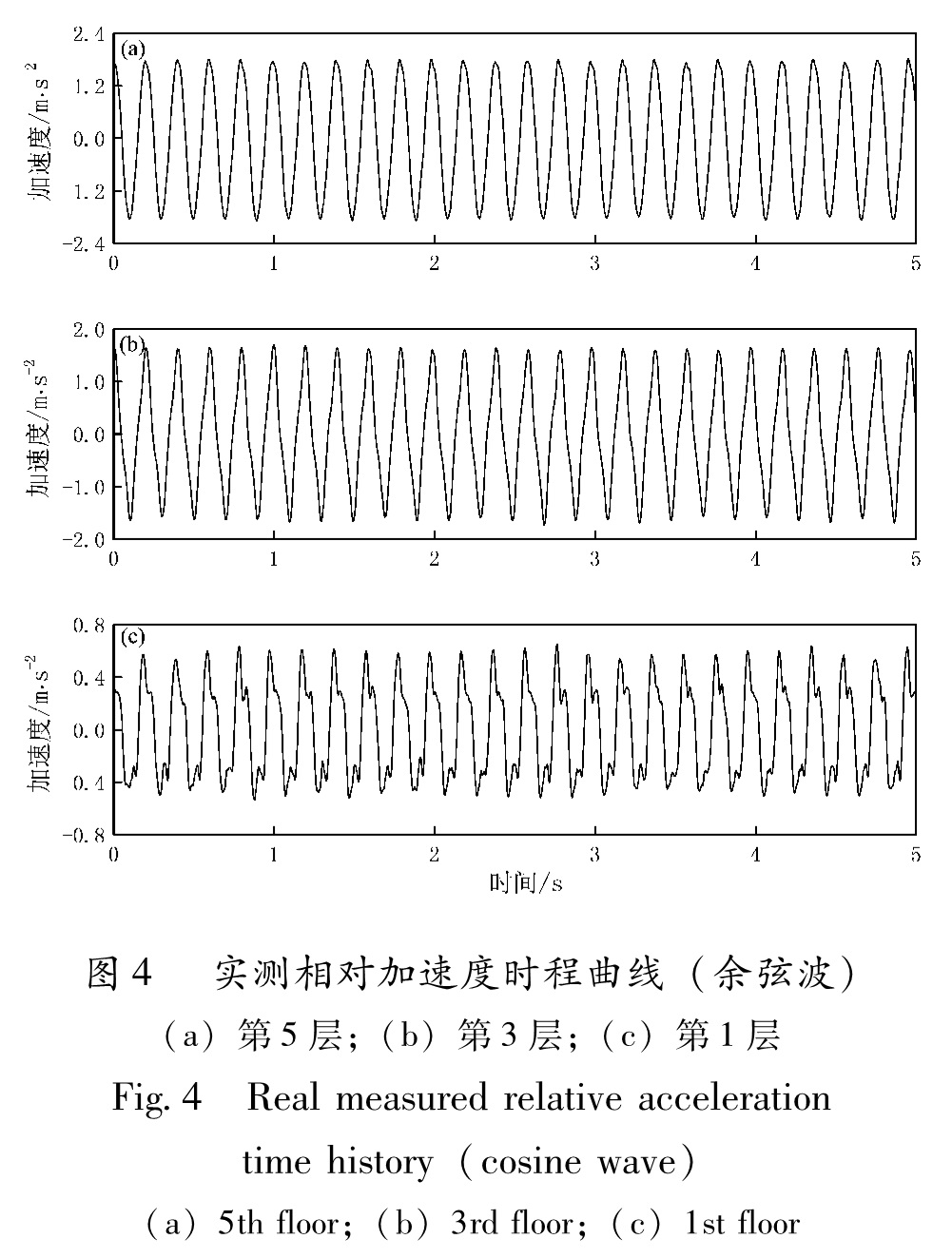
(a)第5层;(b)第3层;(c)第1层
Fig.4 Real measured relative acceleration
time history(cosine wave)
(a)5th floor;(b)3rd floor;(c)1st floor
2.2 余弦波(0.1 g,5 Hz)
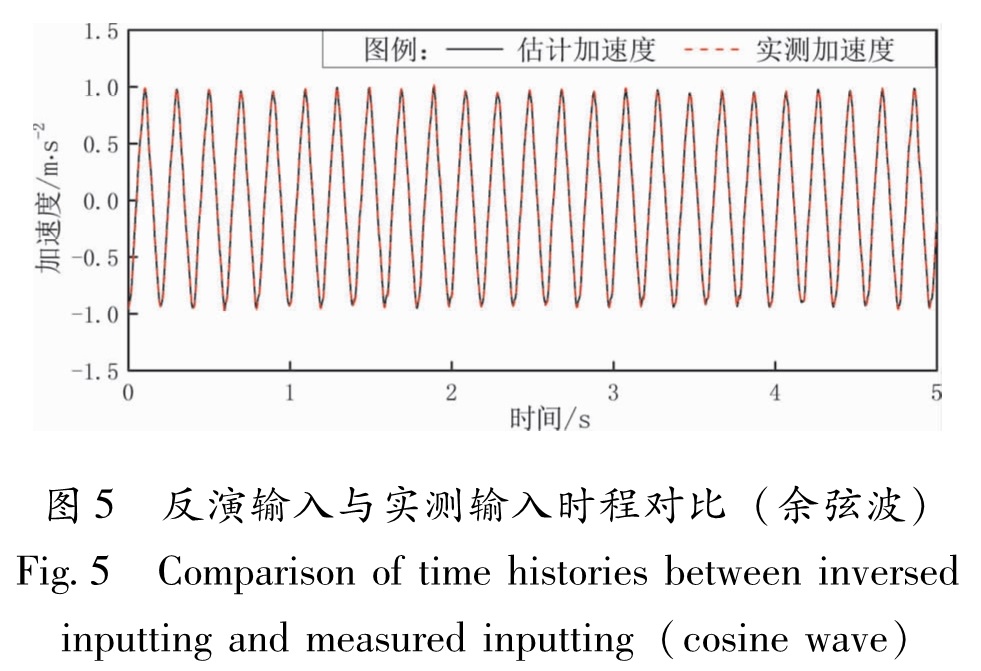
图3和图4分别为余弦波激励时振动台面实测加速度时程曲线和各层相对加速度时程曲线(仅以第1、3、5层示例)。利用基于矩形窗法、SVD-mLM法改进的复合反演算法识别非线性参数系统,参数初值为1.0。结构模型物理参数识别结果列入表1,地震动反演结果如图5所示。
Fig.5 Comparison of time histories between inversed
inputting and measured inputting(cosine wave)
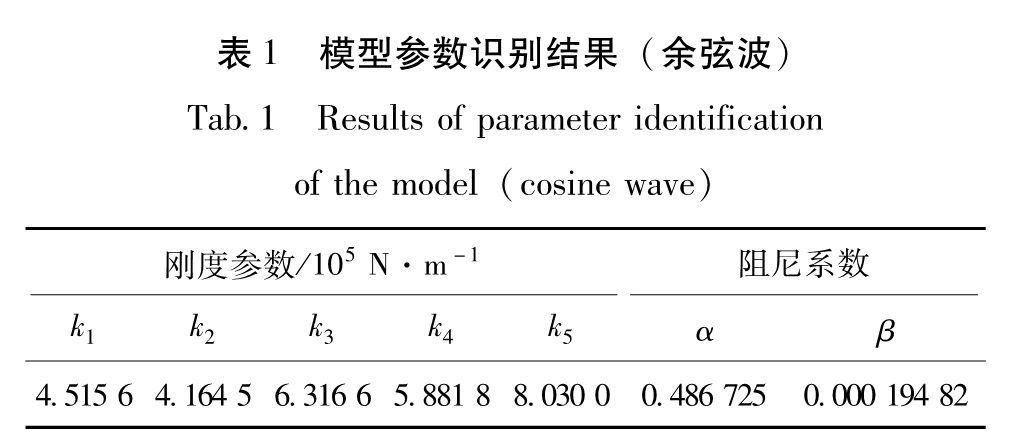
Tab.1 Results of parameter identification
of the model(cosine wave)
刚度参数/105 N·m-1 阻尼系数k1 k2 k3 k4 k5 α β4.515 6 4.164 5 6.316 6 5.881 8 8.030 0 0.486 725 0.000 194 82
2.3 EL Centro地震波(0.48 g)
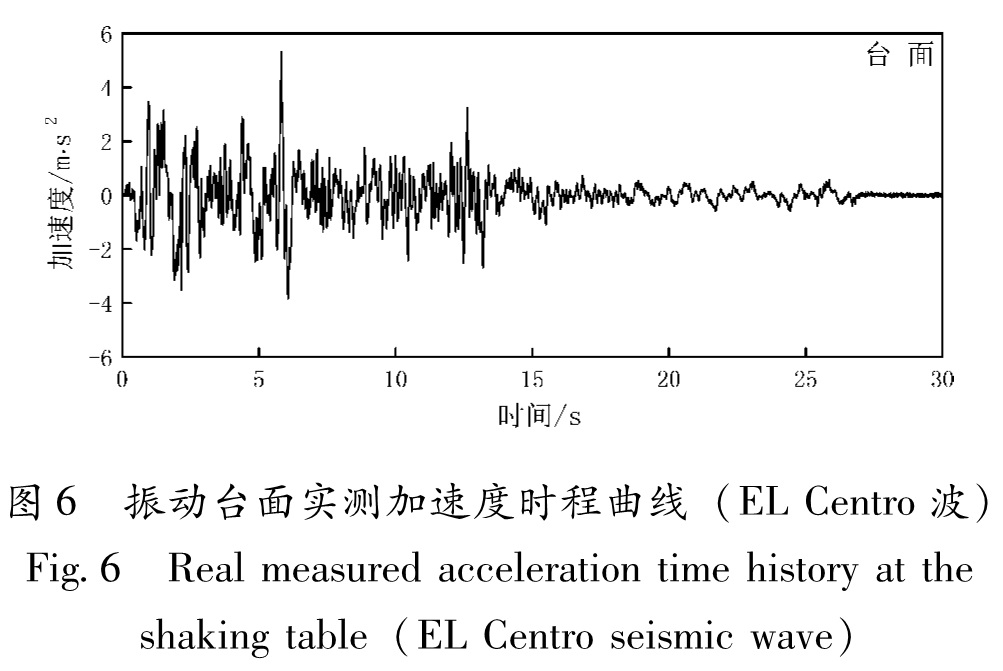
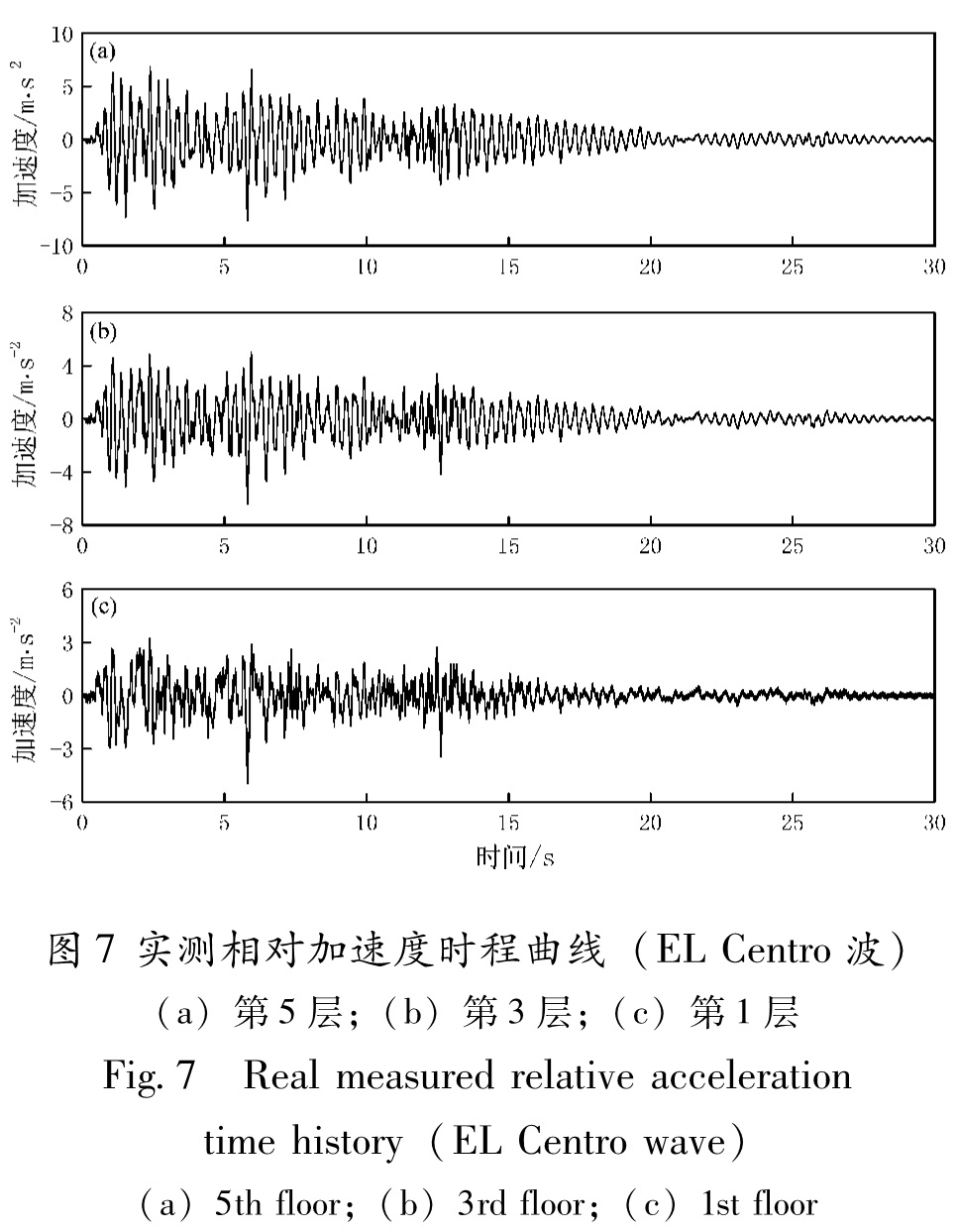
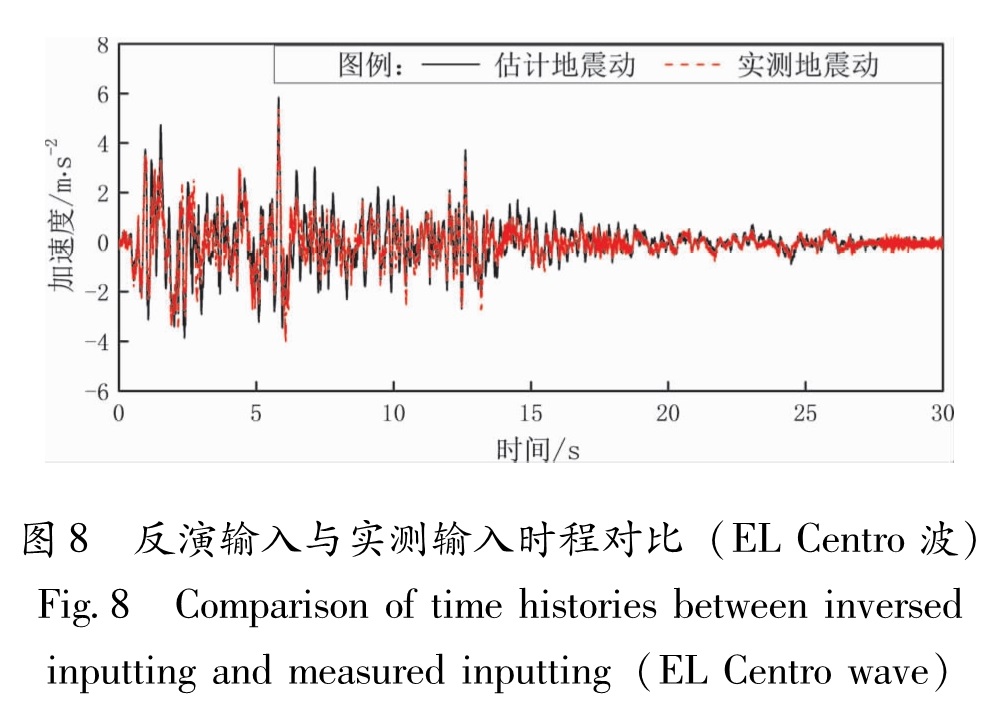
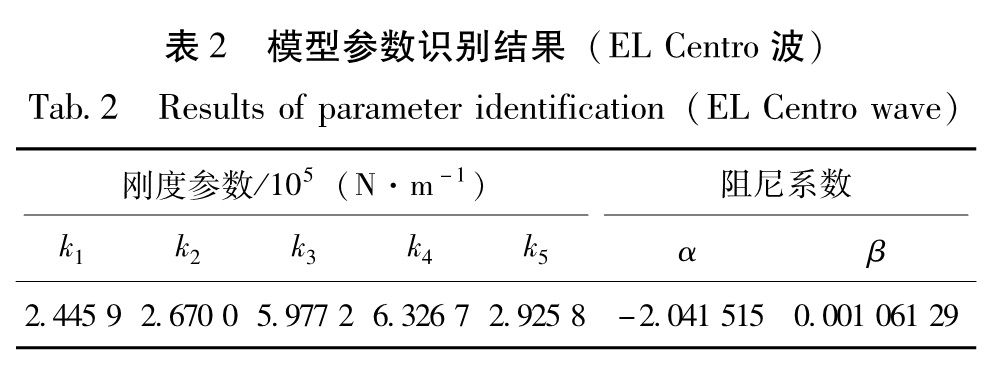
图6和图7分别为EL Centro波激励时振动台面实测加速度时程曲线和各层相对加速度时程曲线(仅以第1、3、5层示例)。利用基于矩形窗法、SVD-mLM法改进的复合反演算法识别非线性参数系统,参数初值为1.0。结构模型物理参数识别结果列入表2,地震动反演结果如图8所示。
图6 振动台面实测加速度时程曲线(EL Centro波)
Fig.6 Real measured acceleration time history at the
shaking table(EL Centro seismic wave)
图7 实测相对加速度时程曲线(EL Centro波)
(a)第5层;(b)第3层;(c)第1层
Fig.7 Real measured relative acceleration
time history(EL Centro wave)
(a)5th floor;(b)3rd floor;(c)1st floor
图8 反演输入与实测输入时程对比(EL Centro波)
Fig.8 Comparison of time histories between inversed
inputting and measured inputting(EL Centro wave)
Tab.2 Results of parameter identification(EL Centro wave)
刚度参数/105(N·m-1)阻尼系数k1 k2 k3 k4 k5 α β2.445 9 2.670 0 5.977 2 6.326 7 2.925 8 -2.041 515 0.001 061 29
从表1可知,振动台激励为峰值0.1 g振幅稳定变化的余弦波时,识别得到的Rayleigh阻尼系数α和β与模态试验的分析结果相比较,误差分别为10.82%和45.10%,说明结构实际的阻尼是非常复杂的。从图5可知,反演的输入时程和振动台台面实测时程是完全吻合的,这也能说明结构模型物理参数识别结果是可信的。
从表2可知,振动台激励为峰值0.48 g振幅急剧变化的EL Centro地震波时,基于10~16 s时间段的测试数据识别得到的阻尼系数出现负值,说明真实阻尼并不完全符合Rayleigh比例阻尼假定; 随矩形窗的前移,参数识别值有所变化(阻尼系数变化较大),表明在真实的震动作用下结构模型实际状态非常复杂。从图8可知,反演的地震动时程与振动台台面实测时程存在较大误差,但前者能够很好地追踪到后者的变化和峰值,这也说明识别出的参数平均值能够反映结构模型在10~16 s地震动作用下所处的复杂状态。
结构模型在两种不同输入激励下,识别的结构物理参数有较大差异,分析其可能原因为:输入为小振幅平稳变化的余弦波时,结构模型侧移幅度较小,每层钢板重量基本垂直施压在立柱上并向下传递,大质量钢板在一定程度上约束了立柱,增大了刚度、减小了侧移,试验模型更接近于理想的剪切型结构。输入为大振幅急剧变化的地震波时,结构模型侧移幅度较大且剧烈摇摆,较柔的立柱弯曲角度较大,致使钢板与立柱连接的角钢螺栓发生松动,板柱连接不再是刚性连接,层间有效高度增大、刚度减小,侧移增大,在螺栓松动的情况下,钢板和立柱也会发生碰撞,使试验模型在地震动激励下处于复杂状态。
基于振动台试验测试数据,利用修正的复合反演算法,识别结构物理参数和反演输入,产生误差的原因有:(1)材料误差(实际值与设计值不符);(2)设计误差(节点的角钢螺栓连接影响有效高度等);(3)制作误差(尺寸不准、螺栓不紧等);(4)试验误差(振动台、仪器等产生的误差);(5)计算误差(试验模型理想化、测试噪声、数值模型简化等问题)等。