收稿日期:2015-11-16
基金项目:国家自然科学基金创新群体项目(51121005)、国家自然科学青年基金项目(51408099)和博士后科学基金(2014M560210,2015T80253)联合资助.
基金项目:国家自然科学基金创新群体项目(51121005)、国家自然科学青年基金项目(51408099)和博士后科学基金(2014M560210,2015T80253)联合资助.
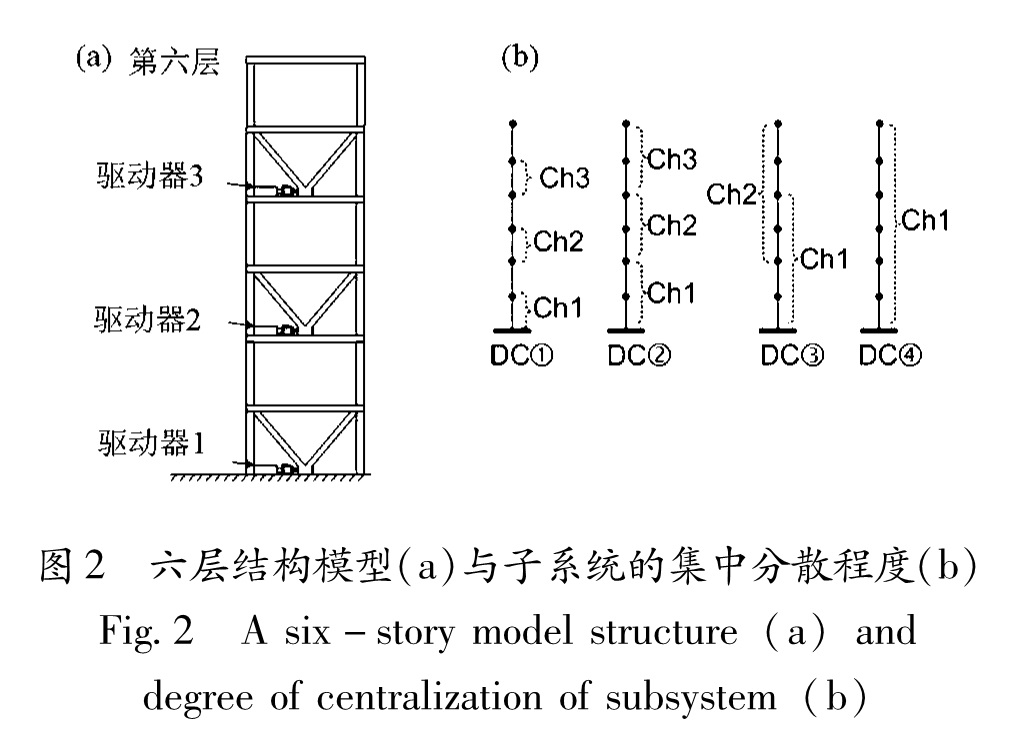
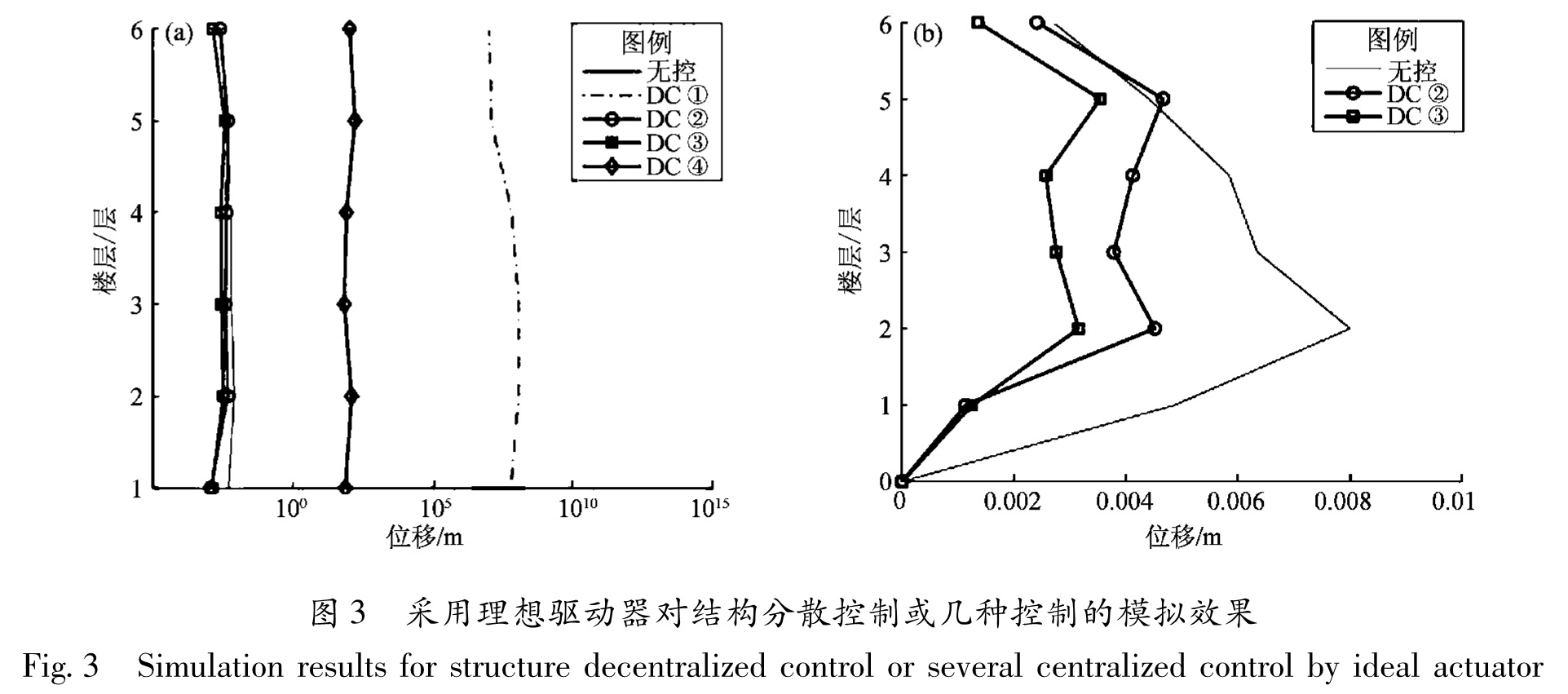
土木工程结构具有尺度大、结构复杂的特点,在结构主动反馈控制中,结构的大尺度会导致反馈的时滞大问题,从而影响甚至恶化结构的振动反应,对结构安全不利。为了解决该问题,针对大尺度土木结构反馈过程的时滞问题提出了H∞分散控制方法。由于分散控制器矩阵的块对角形式,现阶段还没有一个具体的理论或现成的软件来解决BMI这个问题。在离散时域内提出了双同伦法将此BMI近似线性化为线性矩阵不等式,并将集中控制器逐步转化为分散控制器。最后通过6层框架数值算例进行了验证,结果表明该方法可以有效地减小结构反馈控制中的时滞问题,保证了
The civil engineering structure has the characteristic of large scale and complex structure. In the active feedback control of the structure,the large scale of the structure would lead to the big problem of the feedback time-delay,which would affect and worsen the vibration response of the structure,and has an adverse effect on the safety of the structure. To solve the above problems,we proposed the decentralized H∞ control method. Because of the special block-diagonal patterns on decentralized controller matrices,there is no specific theory or off the shelf software to solve the bilinear matrix inequality(BMI)problem. So,we proposed a double homotopy method to solve the BMI problem in discrete time domain. The method approximates the BMI problem to a series of linear matrix inequality(LMI)problems along two homotopic paths,and gradually deforms a centralized controller to a decentralized controller. The proposed method is validated numerically with a six-story building example. The result shows that the proposed double homotopy method could reduce effectively the time lag problem in the feedback control of the structure,and ensure the control effect.