收稿日期:2016-11-07
基金项目:中国地震局地震应急青年重点任务(CEA_EDEM-2016)、中国地震局震灾应急救援司专项课题“基于无人机航拍图像的灾情标识方法研究”和“地震应急公共服务平台研究”联合资助.
基金项目:中国地震局地震应急青年重点任务(CEA_EDEM-2016)、中国地震局震灾应急救援司专项课题“基于无人机航拍图像的灾情标识方法研究”和“地震应急公共服务平台研究”联合资助.
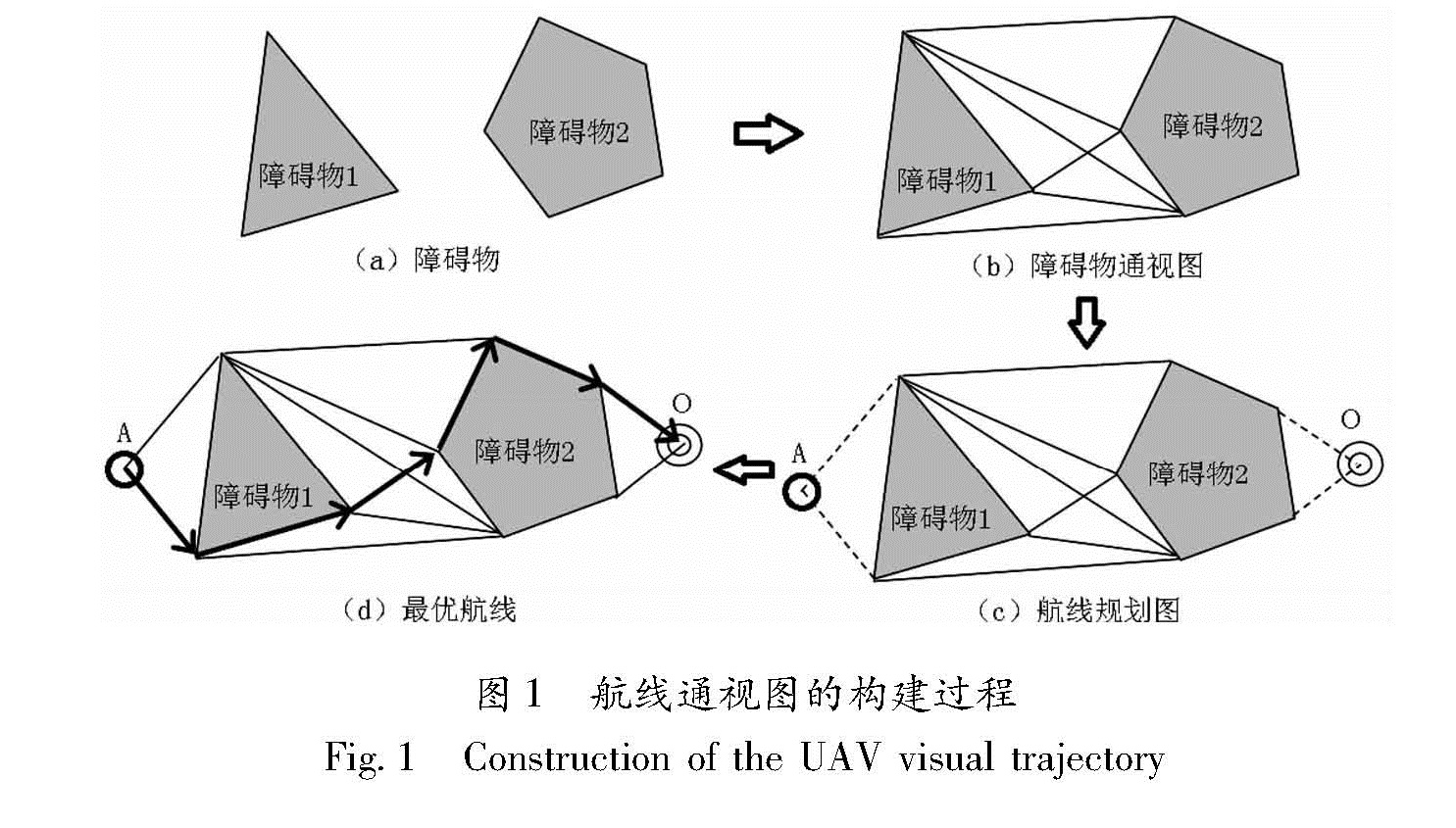
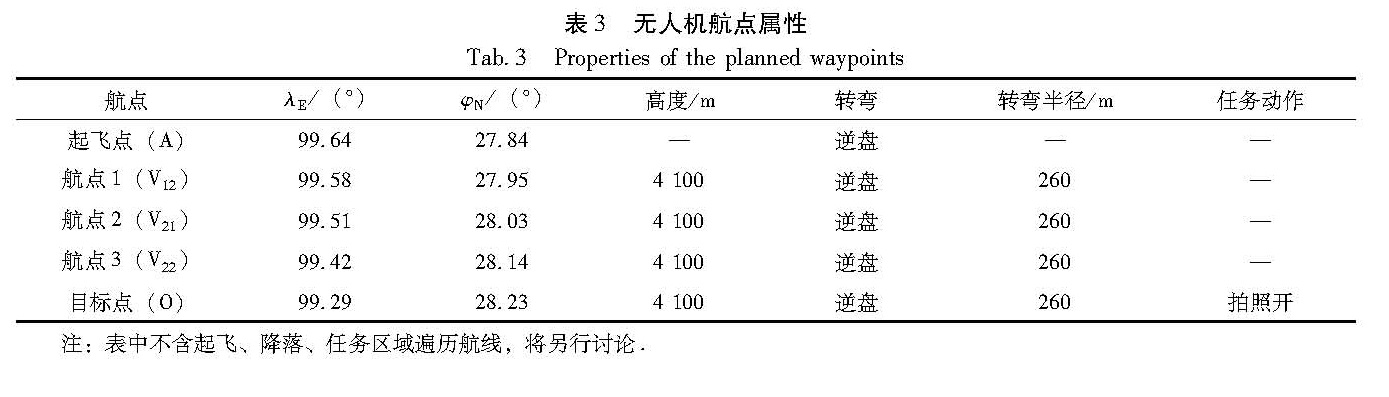
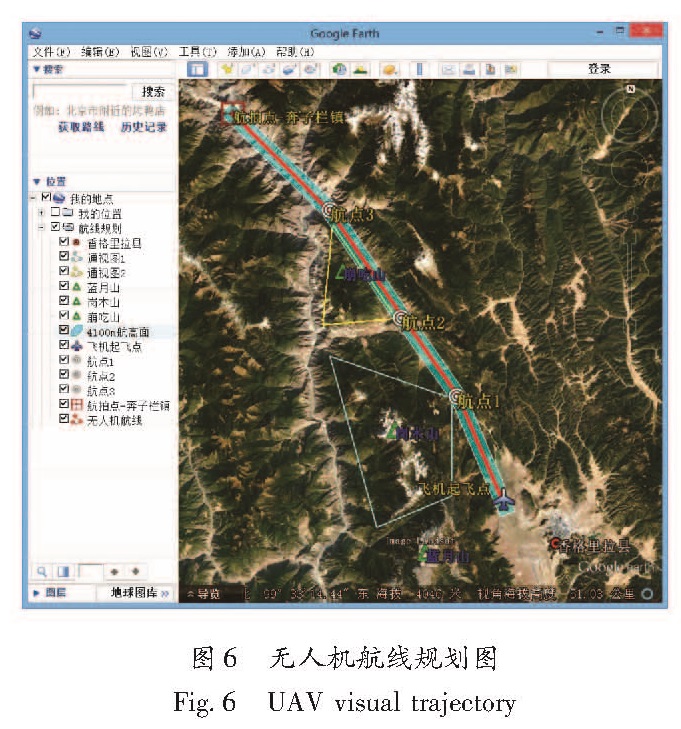
高原山地环境山脉较高,普通无人机在航拍获取地震灾情时很难飞越大型山脉。通过对高原山地地震特征进行分析,阐述障碍物通视图的基本原理,并以香格里拉—奔子栏航线为例进行通视图航线规划,采用迪克斯屈拉(Dijkstra)算法求出航线起飞点到目标点的最短路径,最后利用Google earth软件绘制出最优航线。通视图航线规划为无人机飞越大型山脉或避开障碍物提供了一种较好的航线规划方法。
On the mountainous plateau,civil Unmanned Aerial Vehicles(UAVcan hardly fly over the large mountain ranges when they are applied into the aerial survey for earthquake-disaster information acquisition. In this paper,we firstly analyzed the features of earthquake disasters on the mountainous plateau,and then according to the theory of the visual map,we planned a UAV visual trajectory from Shangri-La to Benzilan located in northwest Yunnan Province. We obtained the shortest path from the starting point to destination by Dijkstra's Algorithm and designed an optimal flight route for UAV by Google Earth software. The planning of visual trajectory proves to be an ideal approach for the UAV to bypass obstacles or fly over large mountain ranges.