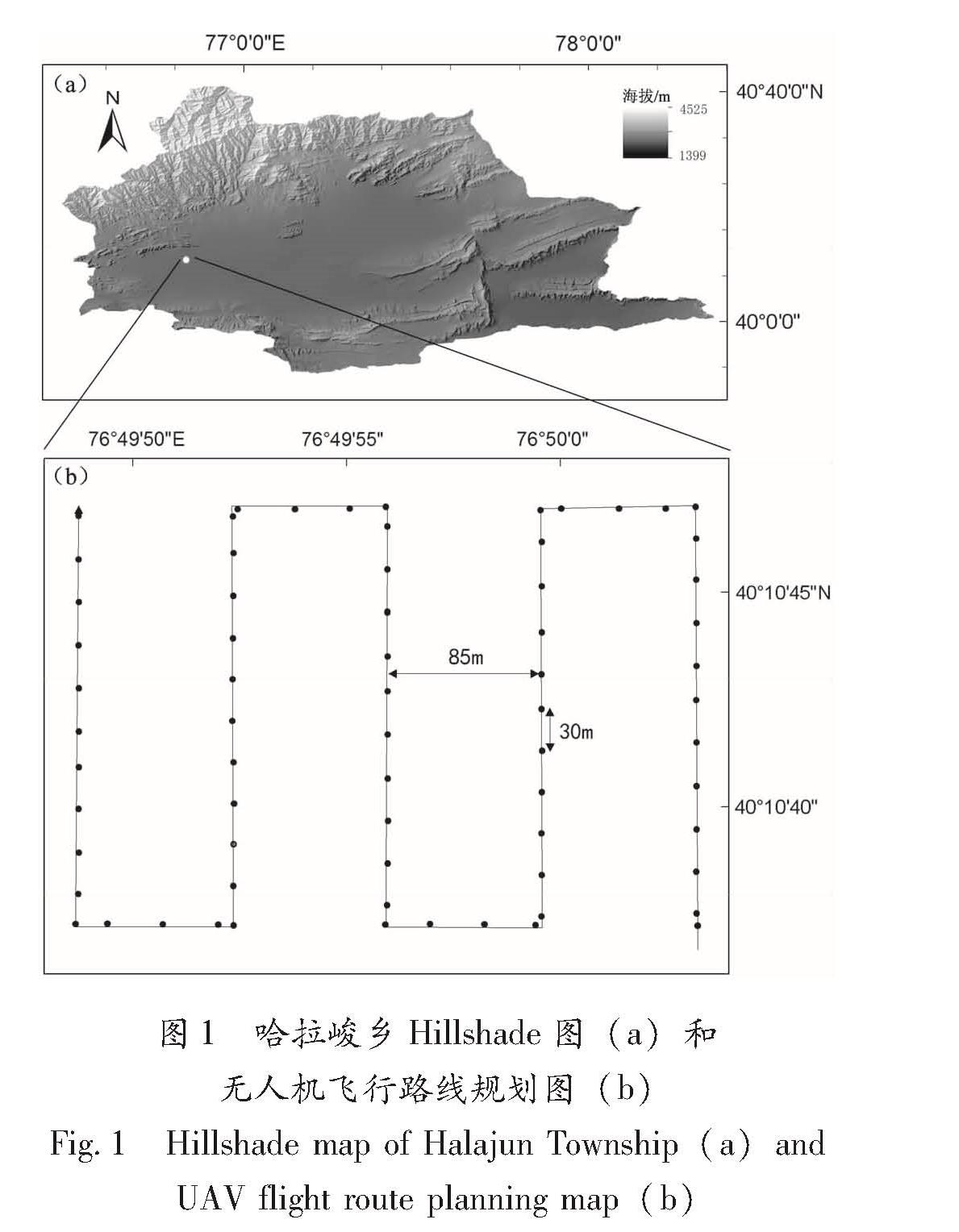
本文选取的研究区为新疆阿图什市下辖的哈拉峻乡琼哈拉峻村(40.178°N,76.832°E)。哈拉峻乡90 m空间分辨率数字高程模型(Digital Elevation Model,DEM)叠加相应的山地阴影Hillshade图,如图1a所示; 无人机飞行路线规划如图1b所示。
本文使用小型四旋翼无人机,为大江精灵3专业版,相机有效像素1 240万,在新疆琼哈拉峻村由软件控制自动飞行获取影像数据。为了便于对拍摄得到的影片进行拼接,保证拍摄时一定的航向与旁向重叠度(程效军等,2005),设置旁向重叠度为75%,航向重叠度为50%,通过飞行拍摄得到69幅高分辨率航拍影片。
实际飞行时将无人机飞行高度(H)设置为相对地面100 m,由于无人机相机焦距(h=4 mm)和感光元件尺寸(d=0.001 58 mm)已知,参考公式:
R=(H×d)/h(1)
式中:R为地面空间分辨率。无人机拍摄影像的地面空间分辨率约为3.9 cm,优于航天平台可见光遥感图像的空间分辨率,达到高分辨率遥感影像的标准。
采用北京天地智绘科技有限公司开发的EasyUAV软件对拍摄得到的影像进行拼接,该软件采用的图像拼接技术主要分为3个步骤:
(1)通过图像预处理对图像中几何畸变进行矫正,使参考图像和待拼接图像不存在明显的几何畸变。本次飞行拍摄得到的影像为正射影像,其最常见的几何畸变是由像主点或中心点向外扩展时光轴倾斜度增大、视野变宽、比例尺缩小所带来的。由于本次飞行的飞行高度较低(100 m),单幅图像的像主点与边缘点相差的实际距离不大,在处理该几何畸变时利用畸变的图像提取阴影信息,沿着图像失真的逆过程恢复图像的原貌。实际的复原过程是设计一个反向滤波器,使其能从失真图像中计算得到失真图像的估值,根据规定的误差准则,最大程度地接近真实图像。预处理过程中还可以对图像噪声进行抑制,去除数据传输中带来的不可预测的随机信号,但这种随机信号极易形成图像上的噪声点。噪声点的去除通常由软件在图像输出时完成,本次输出的图像分辨率较高,人为观察没有发现明显的噪声点,如果此时再用传统的高斯滤波、均值滤波、中值滤波等低通滤波器对图像进行二次处理,反而会使图像的分辨率降低,降低提取精度。
(2)图像配准主要对参考图像和待拼接图像中的匹配信息进行提取,在提取出的信息中寻找最佳的匹配,完成图像之间的对齐。由于无人机拍摄影像分辨率较高,拍摄地区房屋数量较多,所以房屋的角点可以很好地作为配准点。使用逐一配准法对图像进行配准,其原理为:在搜索图S中以某点作为基点(搜索图S的长宽分别为M,N),截取一个与模板T(长宽分别为U,V)大小一样的分块图像,这样的分块图像有(M-U+1)×(N-V+1)个,配准的目标就是在(M-U+1)×(N-V+1)个分块图像中找一个与待配准图像最相似的图像,这样的基准点就是最佳配准点。
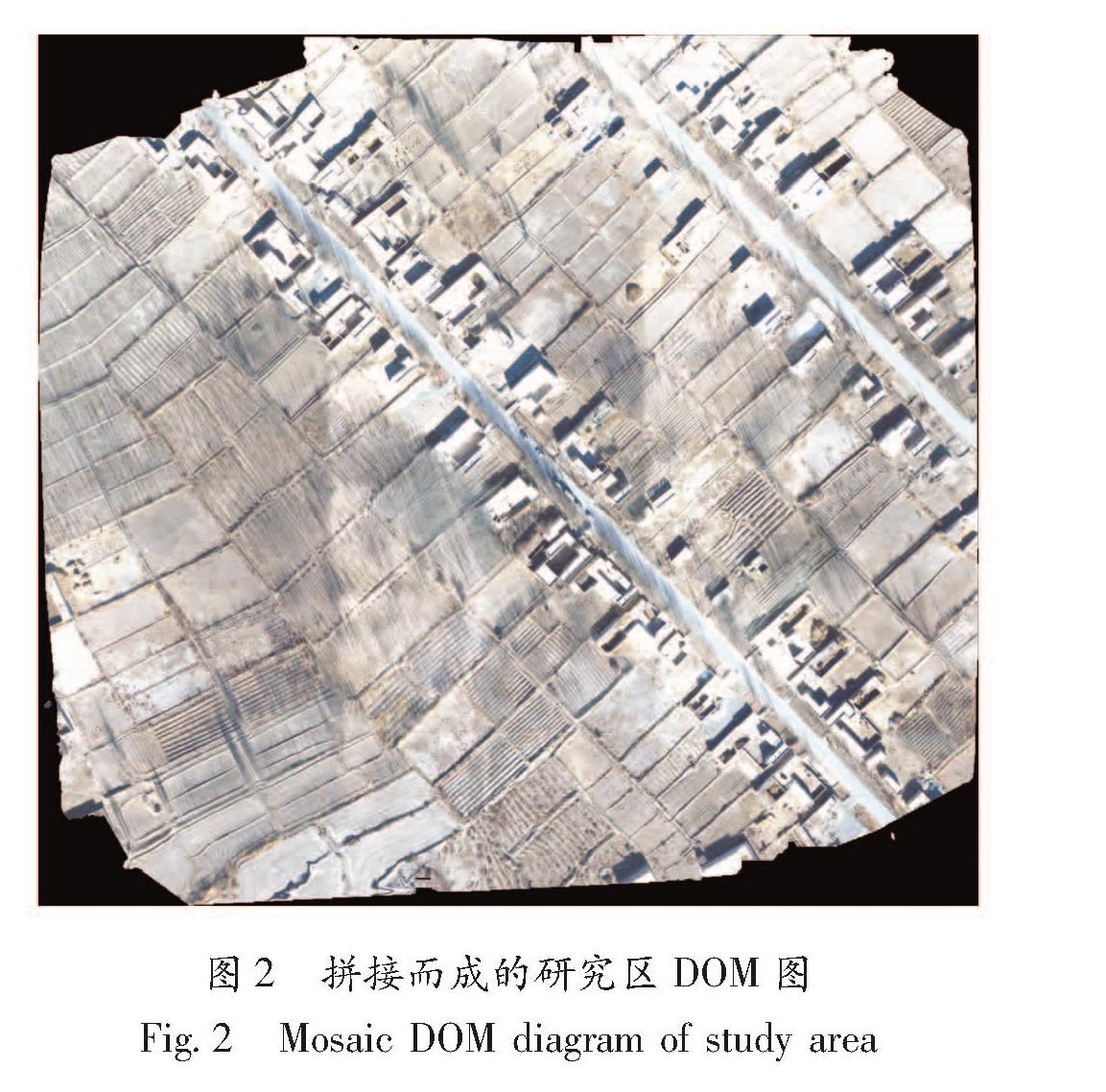
(3)在完成图像配准后对图像进行缝合,对缝合边界进行平滑处理,让缝合自然过渡,最终生成研究区DOM影像(图2)。从图2中可以看出,
图1 哈拉峻乡Hillshade图(a)和无人机飞行路线规划图(b)
Fig.1 Hillshade map of Halajun Township(a)and UAV flight route planning map(b)
图2 拼接而成的研究区DOM图
Fig.2 Mosaic DOM diagram of study area
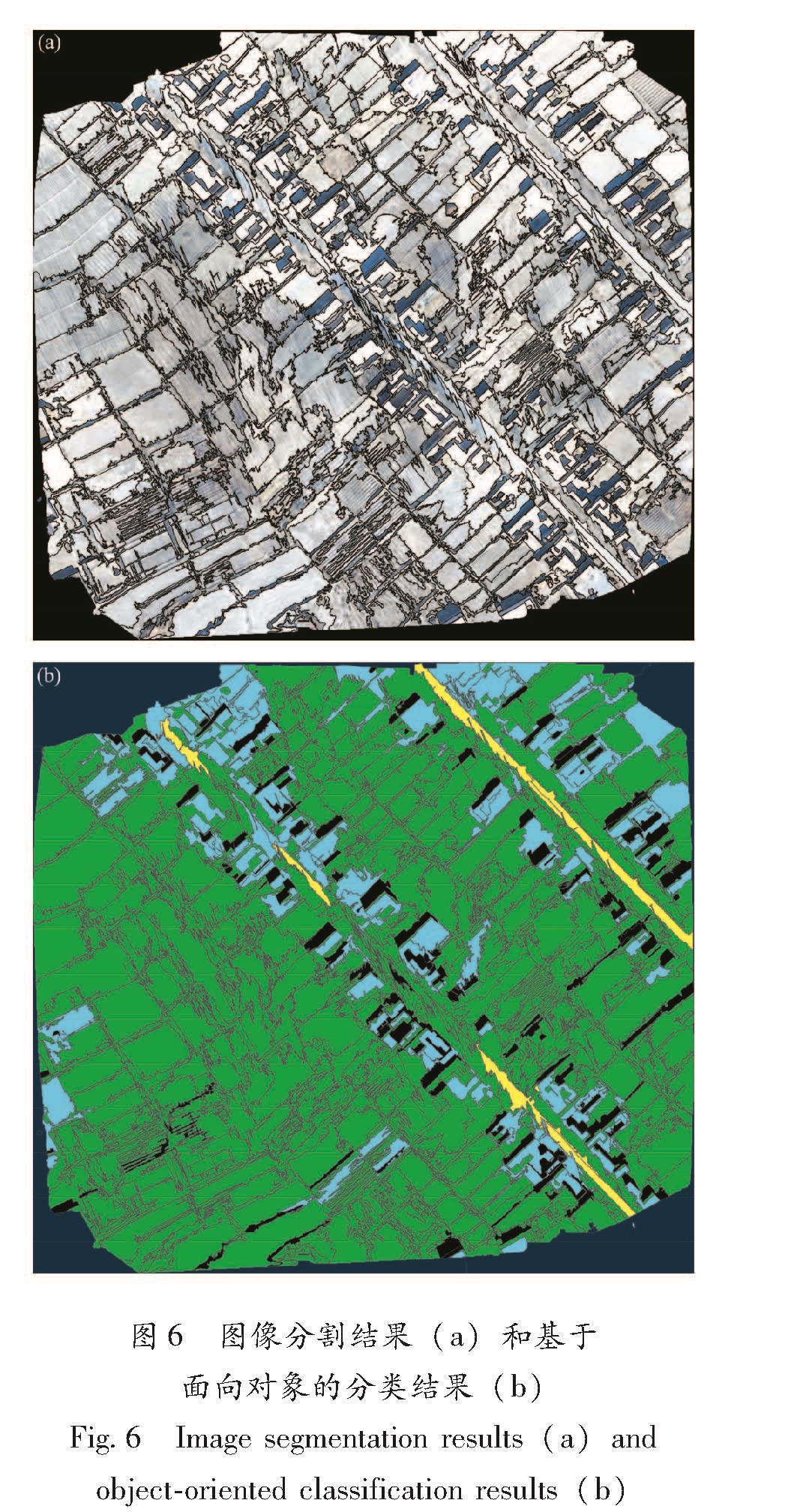
由于拍摄时间在冬季,新疆阿图什市下辖琼哈拉峻村内农田、草地等其他地物的光谱、纹理特征与房屋较为相似,光谱分辨率低极易出现同谱异物现象(田新光,2007; 陈济才等,2014),而这种情况可能会对接下来的分类产生一定影响。