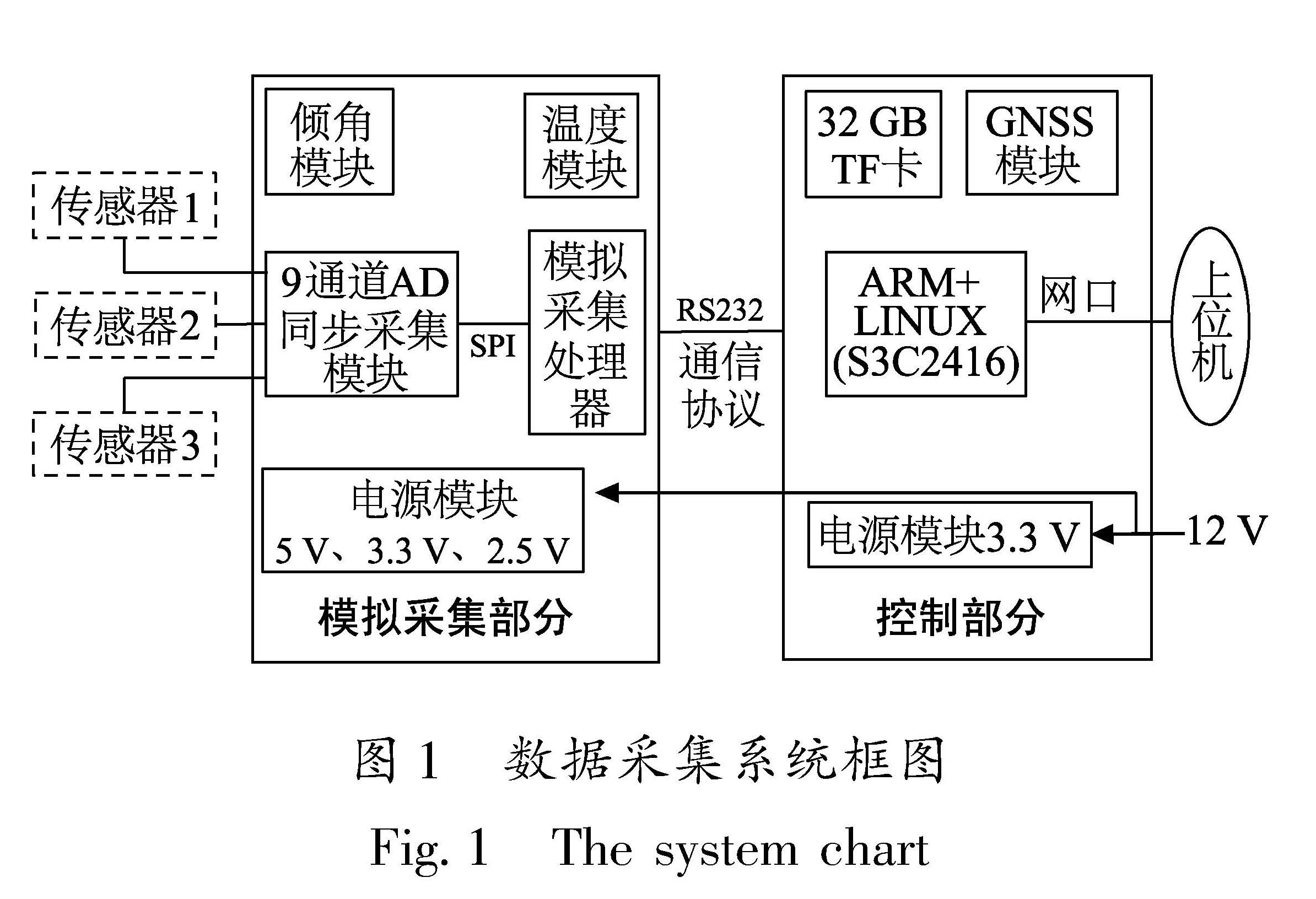
为满足控制部分对系统的软、硬件要求,采用低功耗高性能的32位嵌入式ARM处理器S3C2416作为主控制器,以裁剪后的嵌入式LINUX操作系统作为程序运行平台。采用RS232串口与模拟采集部分进行通信,外接32 GB存储卡作为采集数据存储器; 采用10/100 M自适应网卡作为对外传输通信,并用以查询和设置采集器参数,如图5所示。
图5 控制部分框图
Fig.5 The block diagram of the control section
数据存储模块采用容量为32 GB的TF卡,其体积小、容量大、存取速度快。在9通道50 Hz采样时,可存储大约5个月的连续采集数据。控制器采用SDIO(安全数字输入、输出)接口连接TF卡。
GNSS模块采用灵敏度高、体积小、功耗低的NEO-6M芯片,其内置NMEA-0183标准协议。NMEA-0183协议是为了在不同的GNSS导航设备中建立统一的RTCM标准。该协议定义了多种命令,最常用的6种命令分别为$GPGGA、$GPGLL、$GPGSA、$GPGSV、$GPRMC和$GPVTG,其中$GPRMC包含了最小定位信息,如时间、经纬度等,满足本采集系统校时和定位的设计需求,因此本模块仅解析该命令。
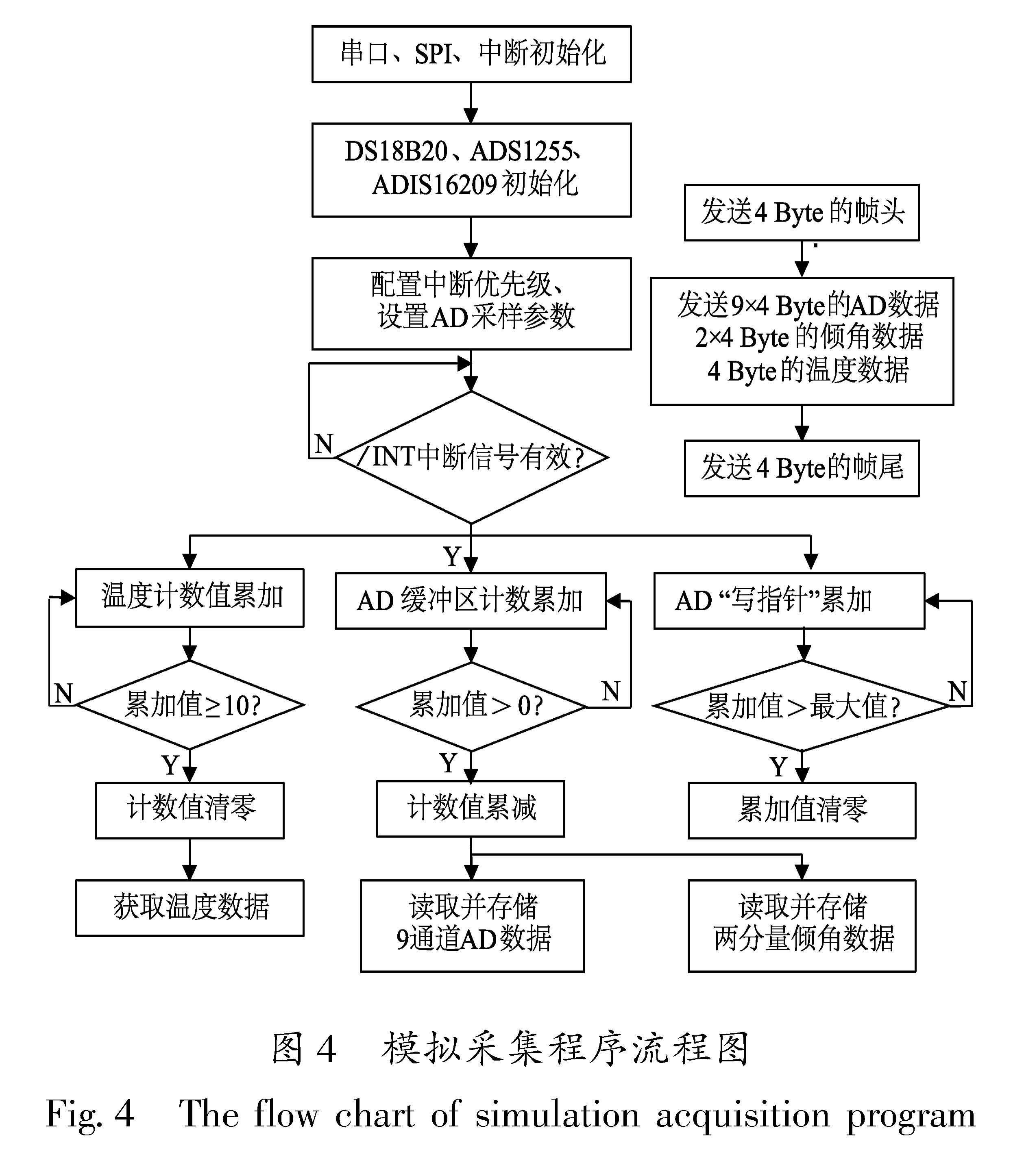
控制部分程序基于LINUX系统设计,分为应用层和驱动层。驱动层通过响应硬件中断,实现实时处理。应用层主要负责数据的接收和处理,并响应各类控制命令,实现人机接口。
驱动程序设计如图6所示。设备驱动程序响应硬件请求,是内核与硬件之间的接口。为使采集数据有精确的采样时刻,采集系统在驱动程序中通过中断方式响应来自GNSS模块的秒脉冲(Pulse Per Second,PPS)信号,并通过SIGNAL信号机制通知应用程序。
图6 驱动程序设计
Fig.6 Design of the driver program
应用程序完成数据采集、数据校时、数据存储、数据处理和网络传输通讯等任务,主要有实时数据接收模块、GNSS高精度时间服务模块、本地数据存储模块、远程数据服务模块,如图7所示。为了实现多任务的“并行”处理,应用程序采用多线程设计。在采集器应用程序设计中,以全局数组变量作为公共的数据缓冲池,并创建4个处理线程:线程1是程序主线程,循环监控网络连接请求。当有远程用户试图连接时,主线程创建一个新的线程去处理,然后继续进行循坏监控; 线程2用于与下位机通信获取采集数据,同时处理GNSS秒响应信号,为采集数据标上精确时间戳; 线程3用于数据的本地存储管理,根据采集器的设置要求按每小时的时间长度保存为连续数据文件,并监控存储空间容量变化情况,根据设置是否要删除过期数据文件等处理; 线程4对采集的原始数据进行解析处理,如数据格式转换等。
图7 应用程序设计
Fig.7 Design of the application program