1.1 SEaTH算法
分离阈值法(SEaTH)是由Nussbaum 等(2006)提出的一种基于 Jeffries-Matudita 距离和高斯分布混合模型的分类特征选取与阈值计算方法,本文结合SEaTH算法,运用隶属度分类的模糊分类规则进行分类。SEaTH算法实施的主要步骤为(王贺等,2013):
(1)样本选择:从分割后的影像中选取约2.5%具有代表性且空间分布均匀的典型样本(薄树奎,丁琳,2010),并从eCognition Developer软件中输出各样本的待选特征值。
(2)计算巴氏距离B值:
B=1/8(m1-m2)22/(σ12+σ22)+1/2ln[(σ12+σ22)/(2σ1σ2)](1)
式中:m1和m2表示2个类别的某特征均值,σ1和σ2表示2个类别的标准差。
(3)计算分离度J值:
J=2(1-e-B)(2)
(4)确定特征阈值:计算某特征的最佳阈值,把2个类的特征值看作高斯分布,根据该公式:
p(x)=p(x〖JB<1|〗C1)p(C1)+p(x〖JB<1|〗C2)p(C2)(3)
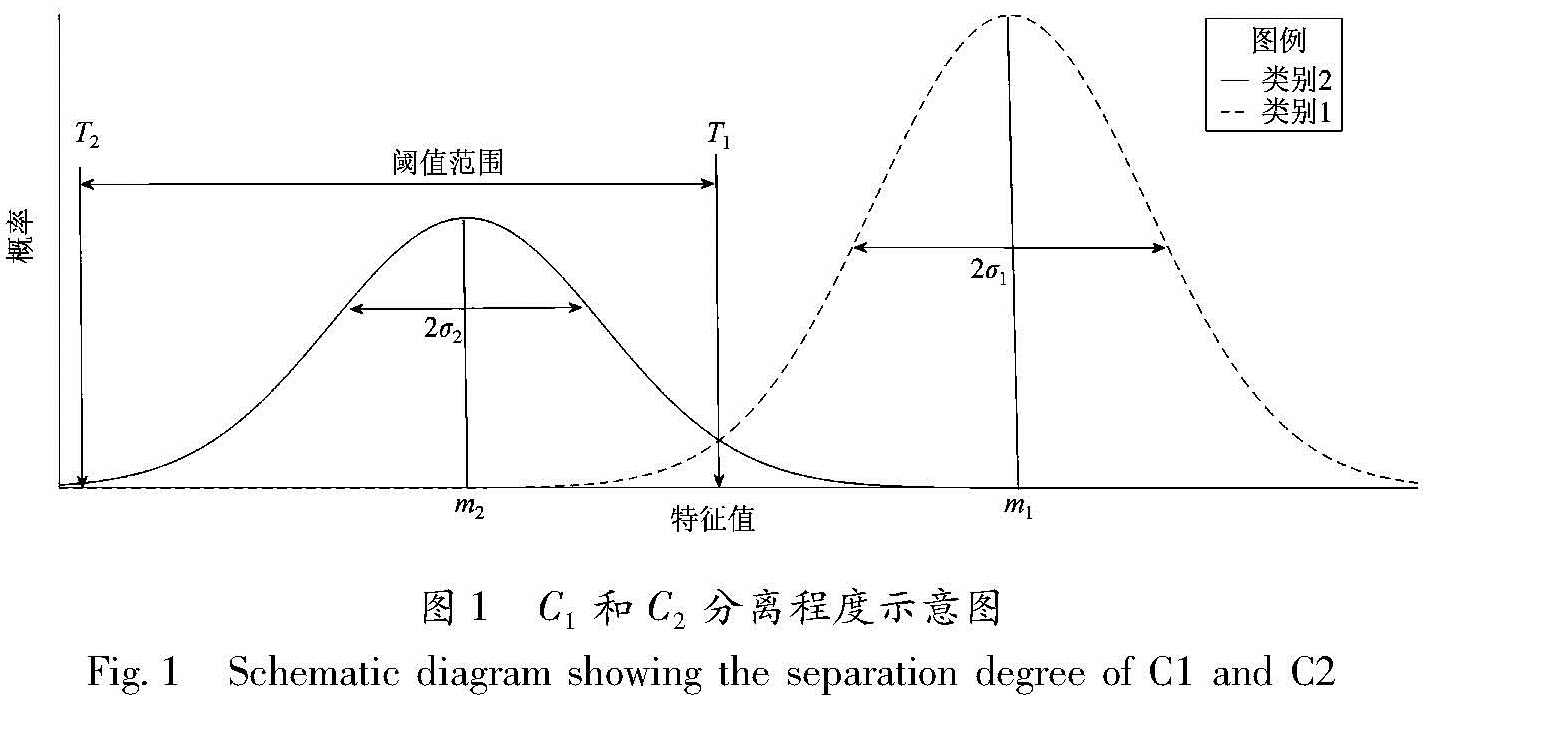
当p(x〖JB<1|〗C1)=p(x〖JB<1|〗C2)时,2种类别之间混分最少,而此时,当对应的特征值为x1时,类别C1和C2的分离性最好(如图1所示),x1便可作为特征阈值T,阈值T的计算公式如(5)、(6)所示:
A=ln(σ1n2)-ln(σ2n1)(4)
T+=1/(σ12+σ22)([m2σ12-m1σ22+
σ1σ2((m1-m2)2+2A(σ12-σ22))1/2](5)
T_=1/(σ12+σ22)([m2σ12-m1σ22-
σ1σ2((m1-m2)2+2A(σ12-σ22))1/2](6)
式中:σ1和σ2表示2个类别的某标准差,n1和n2表示2个类别的数目。
注:阈值T的计算公式有两个,取T介于m1和m2之间作为所要的阈值。
图1 C1和C2分离程度示意图
Fig.1 Schematic diagram showing the separation degree of C1 and C2
1.2 改进的SEaTH算法
面向对象的分类方法充分利用了影像的光谱特征、纹理特征、形状特征和更多的特征,充分调动起地物的特性,从而提高了分类的准确度和可分性。由于使用的特征变量太多,造成了过度分类,使得分类混乱。因此在基于隶属度分类之前,先进行特征优选,然后进行特征去相关处理,去除相关性较大的若干特征。改进的SEaTH算法实施的主要步骤为(余晓敏等,2012):
(1)特征去相关:利用分割后的影像中具有代表性且空间分布均匀的典型样本,根据样本对象的特征值求出所有已选特征的自相关系数矩阵(吉小军等,2001)。设有设有N个特征,任意特征i,j=1,2…N,样本个数为K,自相关系数矩阵用r表示,那么这N个特征的自相关系数矩阵可表示为:
r=(r11 …… r1N
rN1 …… rNN)(7)
rij=(∑Kl=1(xli-x^-i)(xlj-x^-i))/((∑Kl=1(xli-x^-i)2)1/2∑Kl=1(xlj-x^-j)2)(8)
i,j=1,…,N
式中:xli表示特征集中第l个样本第i个特征的值; x^-i表示第i个特征的均值估计,x^-i=1/K∑Kl=1xli。
设置一个阈值依次遍历特征值的相关系数Yij,当某特征对的相关系数Yij大于某阈值时,去掉特征对中相关性强且特征方差较小的特征,由此降低特征矩阵的维度(谭艳丽,张丕状,2007)。本文经过多次实验,设定相关系数Yij的阈值为0.95。
(2)类间距离优化特征:利用(1)中优选的特征集,计算所有类别两两之间的类间距离J,并按特征值降序排列,取类间距离最大的前10个特征。
(3)特征归一化处理:由于所选特征的数量级大小不一,因此对已优化特征进行归一化处理,以便下一步筛选,处理后使其大小介于0~1之间,特征归一化公式为:
f=(f-fmin)/(fmax-fmin)(9)
式中:f为所选特征值,fmax为所选特征最大值,fmin所选特征最小值。
(4)类内距离特征优化:依次遍历C1和C2类中的抽选样本,并计算各个样本与其他同类样本某一特征值(f1,f2,…,fn)的距离,并累积求和。分别得到C1和C2类的类内距离D1和D2。并根据样本数目的不同,分别对C1和C2类赋予权重,求得C1和C2类的加权类内距离D。
d=2/(k(k-1))∑kl=1∑km=l+1(f lj-f mj)2(10)
D=(k1d1+k2d2)/(k1+k2)(11)
式中:k为所选样本类别数,d为类内距离。
(5)构建分类评价准则Jf:采用类间距离和类内距离的比值作为分类评价准则。Jf值越大,说明特征的分离性越好,反正分离性越差。Jf的公式为:
Jf=J/D(12)
改进的SEaTH算法很大程度上的降低了特征集矩阵的维度,去除了相关性大的特征,又根据类间距离和类内距离优化了特征,降低了数据处理量,提高了分类效率。
1.3 精度评估
提取地物信息的准确度是我们评判分类精度的首个标准指标。精度评价指标主要分为生产者精度、用户精度、总体精度和Kappa系数(牛兴丽,2008)。
总体精度(overall accuracy)为:
OA=(∑nij)/n(i=1,…,k)(13)
生产者精度(producer's accuracy)为:
PAj=(nij)/(n+j)(j=1,…,k)(14)
用户精度(user's accuracy)为:
UAi=(nij)/(ni+)(i=1,…,k)(15)
Kappa分析可以用于比较2个分类器的误差矩阵是否具有显著差别,产生的评价指标被称为K统计值,其计算公式为:
Kappa=(n∑ki=1nij-∑ki=1ni+ni+)/(n2-∑ki=1ni+ni+)(i=1,…,k)(16)
式中:n为无人机遥感影像总样本数,k为总的分类类别;
nij为在影像中被分为i类而在参考类别中属于j类的样本数目; ni+为被分为i类的样本数目:ni+=∑nij(j=1,…,k); n+j为参考类别为j的样本数目:n+j=∑nij(i=1,…,k)。