收稿日期:2017-11-17
基金项目:中国地震局震灾应急救援司专项课题“云南地震公共服务平台研发”与云南省青年地震科学基金项目联合资助.
基金项目:中国地震局震灾应急救援司专项课题“云南地震公共服务平台研发”与云南省青年地震科学基金项目联合资助.
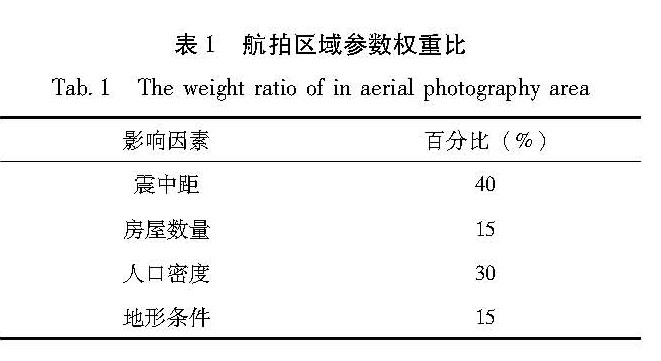
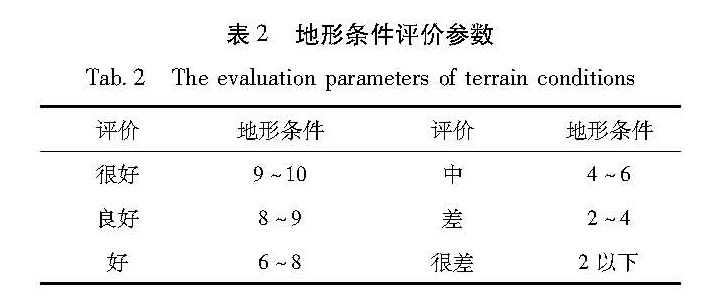
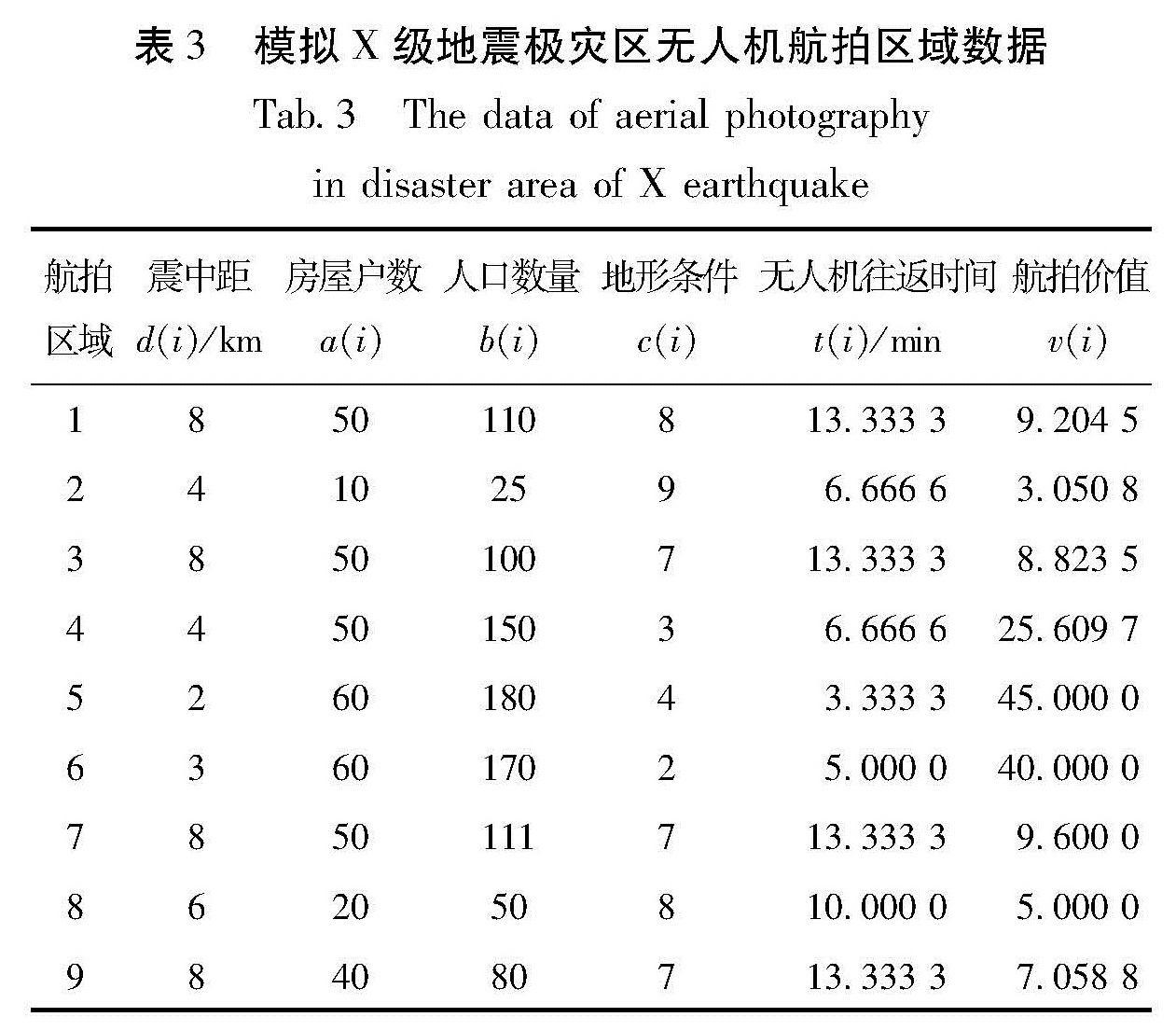
基于蚁群优化算法,提取震后极灾区的震中距、房屋户数、人口数量、地形条件、无人机飞行时间等影响因子,提出震后极灾区无人机最优航拍区域选择方法,并将该方法应用于2016年云龙5.0级地震,实践表明该方法对极灾区开展无人机航拍,为地震后第一时间获取可靠的灾情信息提供有力的技术保障。
Through analyzing the evaluation factors,such as the epicentral distances,the building density,the population,the terrain conditions,the flying speed of UAV and so on,we provide a strong technical support for obtaining reliable disaster information at the first time after an earthquake,by establishing a model of optimal area selection of aerial photograph which based on the Ant Colony Optimization Algorithm,and proposing a most efficient selection method on optimal area selection of aerial photograph after an earthquake disaster.