2.1 连续重力数据收集与预处理
连续重力观测数据gs主要由潮汐部分gt、非潮汐部分gn和误差ε组成,而非潮汐变化方面的gn由重力极潮gp、大气压负荷ga、陆地水负荷gw、仪器漂移gd和剩余误差ε1构成(韦进等,2012; 王乐行等,2025):
gs=gt+gn+ε (1)
gn=gp+ga+gw+gd+ε1 (2)
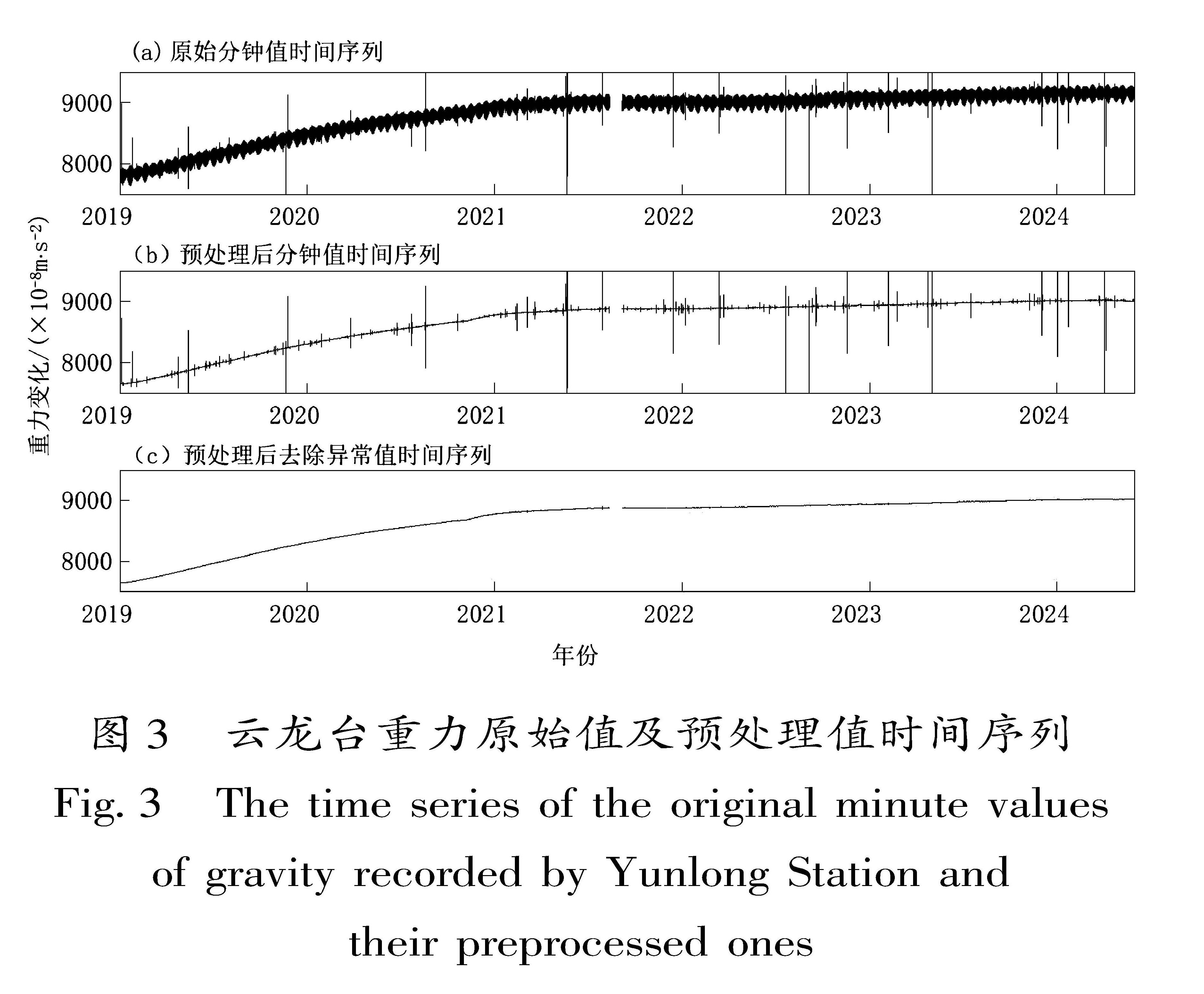
本文收集2019年1月1日—2024年5月31日云龙台gPhone连续重力仪原始观测数据(图3a),通过gMonitor软件预先设置经验参数,对原始资料中的重力极潮、大气压负荷、陆地水负荷等影响因素进行预处理和校正,每个月实时进行格值修正,并采用IERS(国际地球自转和参考系统服务)提供的潮汐模型(ETGTAB潮汐模式)来校正理论固体潮汐的影响(图3b)。
经整理后的数据还需要对地震、阶跃、人为干扰等异常值进行滤波处理,压制和剔除干扰信号,才能使非潮汐变化信号得到凸显。本文采用基于中值和中值绝对偏差(MAD)的Hampel滤波器来对数据作处理,相对于传统均值和标准差方法,Hampel滤波器通过使用中值和MAD提高异常值检测的准确性,识别并去除时间序列中的异常值。图3c是本文使用Hampel滤波器对数据异常值进行识别与剔除后的时间序列。
图3 云龙台重力原始值及预处理值时间序列
Fig.3 The time series of the original minute valuesof gravity recorded by Yunlong Station andtheir preprocessed ones
从图3可以看出,经去除固体潮汐、气压等因素后得到的连续重力预处理分钟值时间序列,大约以2021年4月为界分为2个阶段:第一阶段约2.3 a,观测值增长较快,总变化量约为1 189×10-8 m/s2,年速率约为517×10-8 m/s2; 第二阶段3.1 a,观测值增长明显变缓,总变化量约为184×10-8 m/s2,年速率约为59×10-8 m/s2; 第一阶段漂移率明显大于第二阶段; 从总的5.4 a连续观测数据变化趋势来看,仪器漂移较大,且非线性特征明显。
2.2 基于流动重力控制的漂移修正原理与方法
目前流动重力联测在云南的测点达到249个,其中包括9个绝对重力点,测段数为274段(刘东等,2021),平均点间距小于70 km,具有较好的空间分辨率,但是年均观测1~2期,时间分辨率不足; 而云南现有连续重力台站14个,空间分辨率不足,却可以达到秒级采样率,具有较好的时间分辨率。云南14个连续重力台站都进行了流动重力联测,采用本文的漂移率修正方法,可以在局部区域进行联合分析,弥补两者各自的不足。
云龙台周边有2个绝对重力观测台站,即丽江台及下关台,每年均进行绝对重力观测。云南省流动重力测量时,会将云龙台与2个绝对重力台站进行联测,结果如图4所示。联测过程采用CG-5型石英弹簧相对重力仪,采用A→B→C→……→C→B→A往返双程测量方法,并形成闭合环。通过去除漂移、固体潮等影响因素并平差解算后,获取云龙台基于2个绝对重力点控制下的重力值,
图4 云龙台与2个绝对重力台站联测
Fig.4 The joint observation network composed ofYunlong Station and other two absolute gravitystations:Xiaguan and Lijiang
相邻两期变化量视为云龙台该时段内的实际变化量。即相邻两期流动重力观测变化量gi,同时间段预处理连续重力仪观测变化量Gi(取该时段起止日期的日均值之差),Gi-gi为该时段内连续重力仪的漂移量。漂移量除以该时段总时长Ti(以分钟计算)即为该时段内的漂移率,通过该漂移率可以修正本时段内任何时刻观测量(分钟值)的漂移值。如下式所示:

式中:Gk为第i时段内第k分钟的值; G'k为该时刻连续重力预处理值; Gi-1为i-1个时段漂移量的总和;  为第i时段的漂移率; t'k为时长; i为需要计算的时段,1≤i≤n且为整数,n为根据流动重力观测划分的总时段数。
为第i时段的漂移率; t'k为时长; i为需要计算的时段,1≤i≤n且为整数,n为根据流动重力观测划分的总时段数。
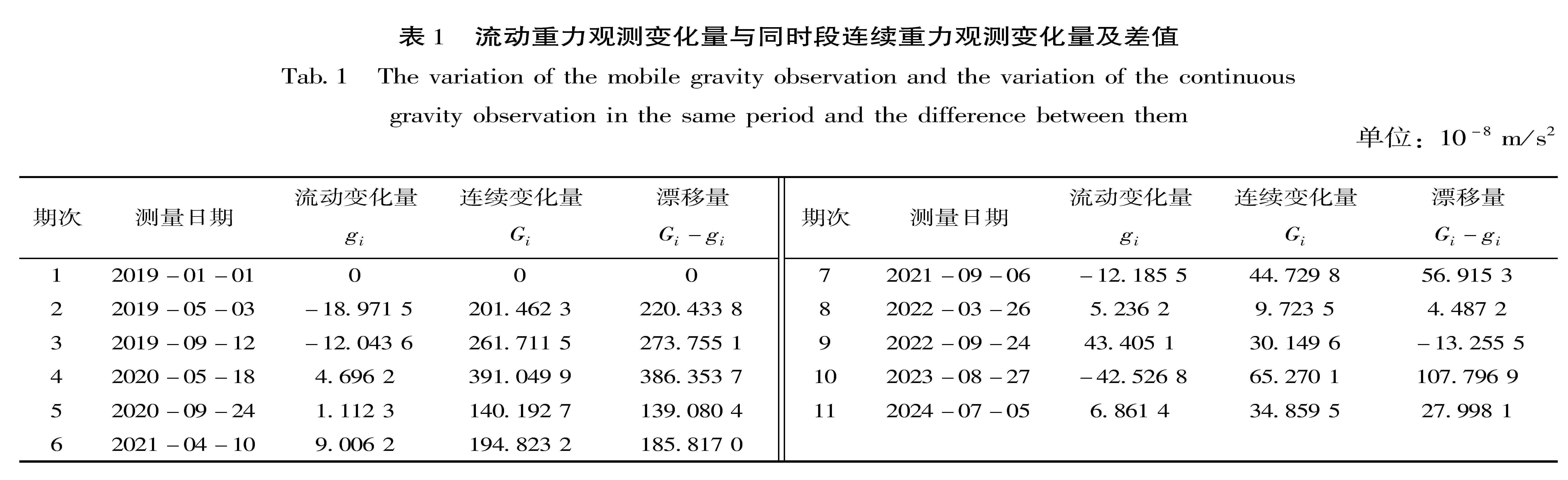
本文收集云南流动重力测网2018年第二期至2024年第二期观测资料,以2019年1月1日云龙台连续重力仪正式并网记录开始为第1期,视流动变化量g1与连续变化量G1都为0。从第2期开始,依次分别计算本阶流动变化量gi、连续变化量Gi以及漂移量Gi-gi,结果见表1。
通过式(3)及表1对连续重量预处理值进行计算,得出云龙台连续重力基于流动重力控制的5.4 a漂移修正结果,如图5所示。
表1 流动重力观测变化量与同时段连续重力观测变化量及差值
Tab.1 The variation of the mobile gravity observation and the variation of the continuous gravity observation in the same period and the difference between them
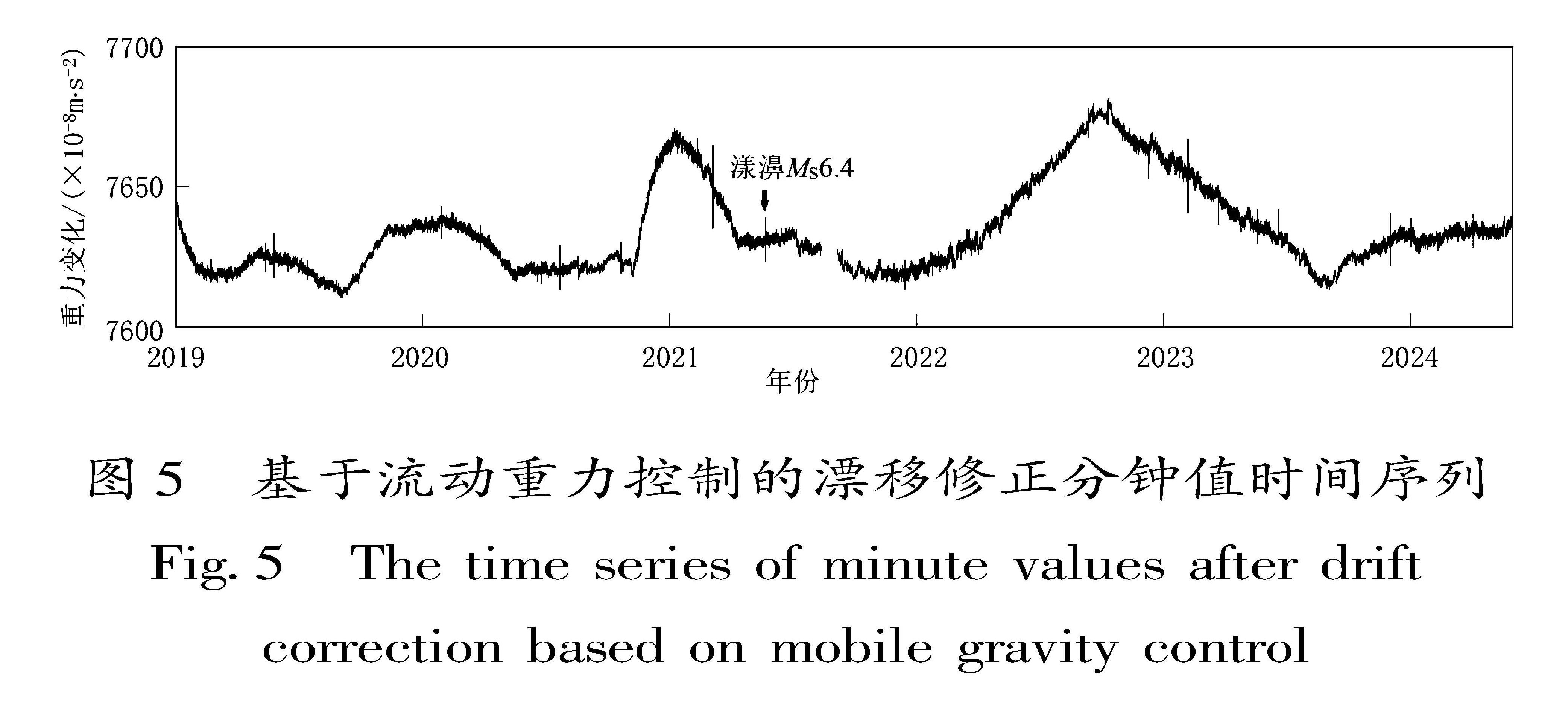
图5 基于流动重力控制的漂移修正分钟值时间序列
Fig.5 The time series of minute values after driftcorrection based on mobile gravity control
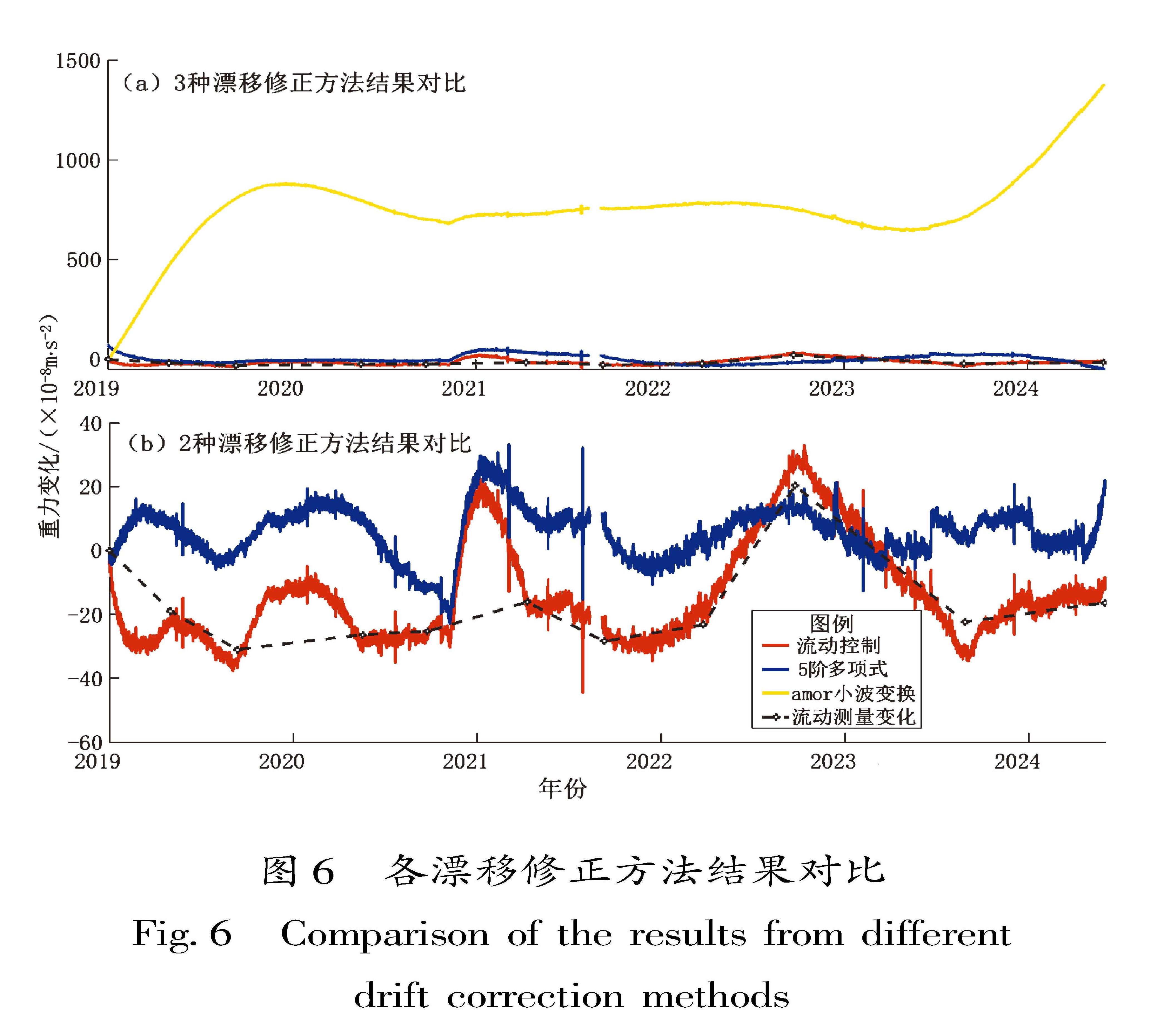
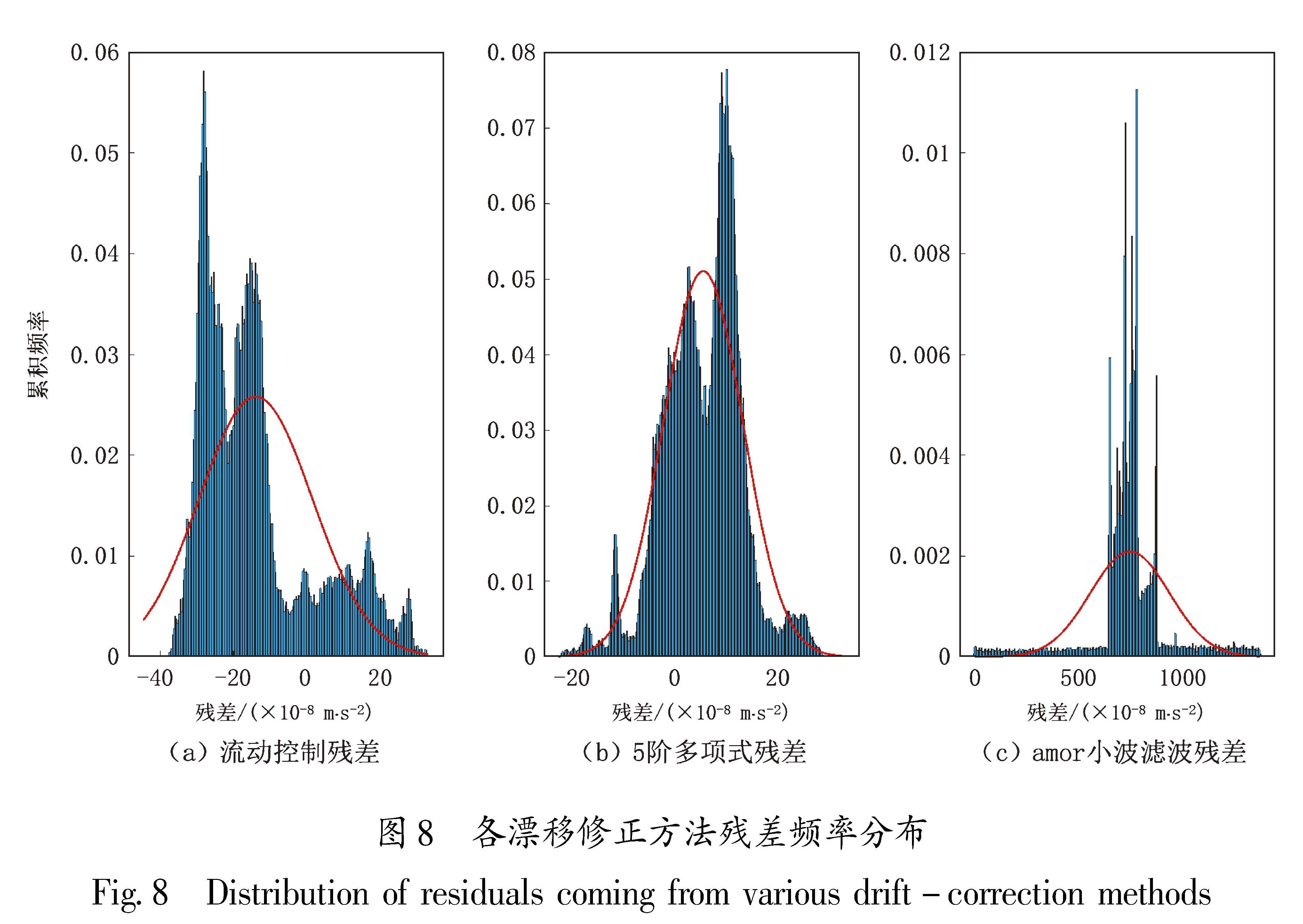
对比图3与图5可以看出,采用流动重力测量结果作为控制进行漂移修正后,连续重力整体变化趋势被有效压制,累计变化量从约1 374×10-8 m/s2降至69×10-8 m/s2,漂移修正后的时间序列显示出一定的起伏状态,该结果可能更接近构造运动或地下物质迁移引起的真实重力变化。为了检验本方法修正结果,后文将利用目前常用的多项式拟合和小波滤波方法进行对比分析。